veRL 源码解析(一):RLHF 训练框架的挑战与 veRL 的破解之法
1. RLHF 工程化的 “不可能三角”
大型语言模型(LLM)的崛起,将强化学习从学术象牙塔推向了工业应用的前沿。RLHF 已成为 LLM 对齐、行为塑造的 “黄金标准”。然而,其工程实现并非坦途。当前业界主流的 RLHF 框架,多是基于现有大模型训练框架(如 Megatron-LM、DeepSpeed)和高性能推理服务(如 vLLM、SGLang)的“缝合怪”。
这种 “胶水工程” 虽然能快速启动,却在系统层面陷入了一个难以调和的 “不可能三角”:极致的性能、灵活的建模、高效的资源利用。
本文作为 veRL 源码解析系列的首篇,将分析 RLHF 工程化的核心痛点,剖析这个“不可能三角”的内在矛盾,并揭示 veRL 及其背后的 HybridFlow 思想,是如何以一种系统性的、颠覆性的思考,为破解这一难题提供了全新的视角。
2. 性能瓶颈:训练与推理的高昂 “切换成本”
2.1. 核心矛盾
RLHF 流程的核心是 Actor 模型的迭代优化,这天然地将一个模型置于两种截然不同的“工作模式”中:生成(Rollout) 和 模型更新(Update)。Actor 训练是计算密集型,而生成(Rollout)是内存密集型。
Rollout 模式(推理):追求极致的 吞吐量和低延迟。推理引擎(如 vLLM、SGLang)为此进行了大量优化:KV Cache 管理、动态批处理、单机内张量并行 (TP)。
Update 模式(训练):追求极致的 模型规模和训练稳定性。训练框架(如 Megatron-LM、DeepSpeed)为此进行了复杂设计:3D 并行(张量并行 TP、流水线并行 PP、数据并行 DP)、激活重计算、优化器状态分片。
这两种模式的优化目标和实现方式,导致了它们对模型权重的 物理布局(Sharding Scheme) 和 显存管理策略 存在根本性差异。比如我们以 Megatron-LM 和 vLLM 为例:
- Megatron-LM:为训练效率,可能将 Transformer 层的 QKV 权重合并并进行列并行切分(TP);流水线并行则将不同层分布在不同 GPU 上。其参数和优化器状态可能被进一步分片到不同 GPU 甚至 CPU。
- vLLM/SGLang:为推理效率,可能需要独立的 Q、K、V 矩阵,或采用不同的张量并行切分方式。其核心显存开销在于 KV Cache,而非模型参数本身。
2.2. 切换成本
当同一个 Actor 模型需要在 Rollout 和 Update 模式之间切换时,传统架构的 “缝合怪”不 得不面对一个问题:模型权重需要被重新组织和传输。 这种切换可能导致显著的通信和内存开销。例如,对齐一个 70B 模型,每次 RLHF 迭代中将 140GB 的模型权重从训练转移到生成,可能占用迭代时间的 36.4%。
将 GPU A 上的 Megatron 格式权重,拷贝到 CPU,进行复杂的重组(如拆分 QKV、重新切片),再拷贝到 GPU B 上的 vLLM 这个过程涉及大量的 PCIe 带宽消耗和 CPU 计算。并且切换过程中,GPU 处于闲置状态,无法进行任何有效计算。这直接导致 RLHF 迭代周期的延长,成为性能瓶颈。
2.3. veRL 的破解之法
veRL 提出了一套 3D-HybridEngine,实现了 Actor 模型在训练和生成阶段之间高效重新分配,实现所谓的零内存冗余并显著减少通信开销。
veRL 在同一组设备上部署 Actor 训练和生成阶段,并使用同一份 Actor 模型权重副本。这并非简单地将训练和推理模型加载到同一台机器上,而是指在物理显存层面,模型权重只有一份。3D-HybridEngine 的目标是让训练引擎和推理引擎能够共享这份物理副本,并通过零成本的 “视图切换”来适应各自的并行需求。
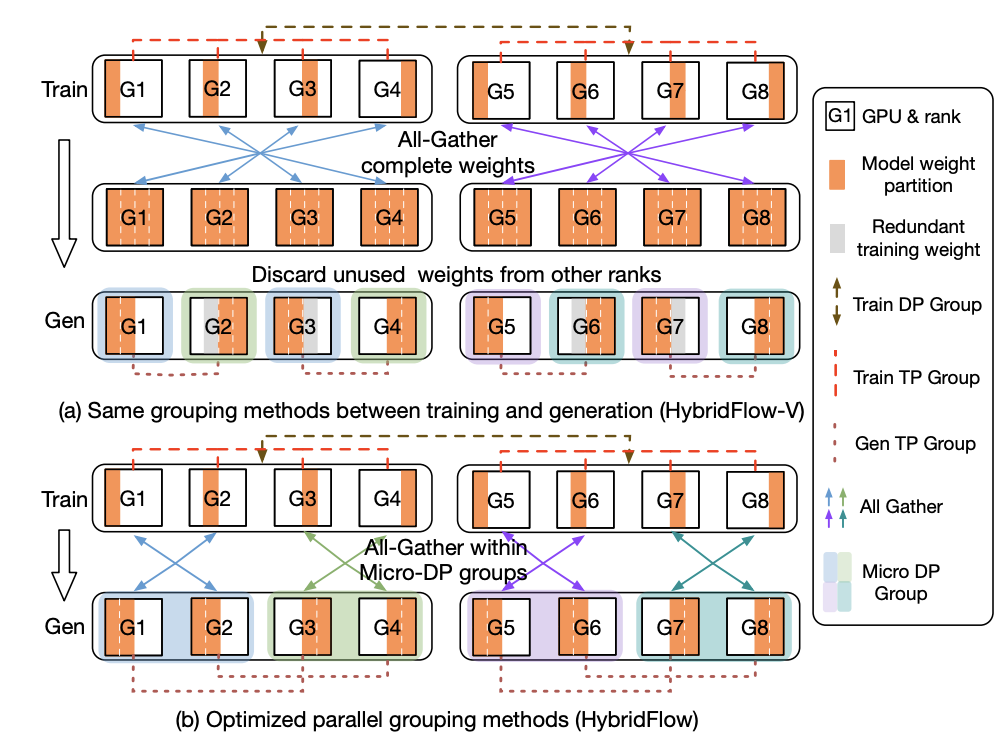
传统的模型权重重分配方法(HybridFlow-V)在训练和生成阶段使用相同的并行分组方法,但由于并行大小不同,会导致部分 GPU 上存在冗余权重,且在切换时需要 All-Gather 完整权重再 Partition。上图的 (a) 子图就展示了这个过程。这种方法导致 GPU 在中间状态的时候会保留了当前阶段不需要的权重。且通信开销巨大:每次切换都需要进行一次 全局的 All-Gather 操作,将所有分片汇聚到每个 GPU 上,再进行重新分片。
veRL 提出的核心优化在于 重新设计生成阶段的并行分组方法,以实现与训练阶段的权重布局 在物理上的重叠。
上图 (b) 展示了 veRL 的关键优化,其核心思想是:在训练时,就以一种跨 DP 的张量并行 (TP) 重组方式预设权重布局,使得生成阶段的 TP 分组在物理上刚好复用训练时的 shard,无需复制。
具体操作如下:
8 个 GPU 的训练 / 生成并行布局:
- PP(流水线并行)数:1(即无切片)
- TP(张量并行)数:4
- DP(数据并行)数:2
共:1 × 4 × 2 = 8 GPU
veRL 在训练时将权重按 TP 方向分片后,分布在以下 GPU,每四张为一个 TP 组:
[G1, G2, G3, G4], [G5, G6, G7, G8]
而为了切换到生成阶段,假设目标是:
- 生成 TP 数:2(但组合方式不同)
- Micro-DP 数:4(每组两张卡)
veRL 提前按照如下方式划分生成 TP 组:
生成 TP 分组(交叉组合):
[G1, G3], [G2, G4], [G5, G7], [G6, G8]
生成 Micro-DP 分组:
[G1, G2], [G3, G4], [G5, G6], [G7, G8]
这种交叉组合的结构确保了每个生成 TP 组都能复用训练时已有的权重切片。每个 GPU 只保存自己训练时的 shard,在生成时无需进行全局的 All-Gather 操作。这样,切换到生成阶段时,只需在 Micro-DP 组内进行局部的 All-Gather 操作,就可以得到 TP 组所需的完整权重。
传统方法需要全组 all-gather,再 partition,veRL 只需在 Micro-DP 内做局部 All-Gather 即可。

与基线相比,veRL 的平均将切换时间减少了 55.2%,在 70B 模型上更是减少了高达 89.1%。
不过在目前的 veRL 版本中,为了让训练和推理彻底解耦这部分的逻辑已经被删除了,后续代码解析的文章里面我们会细说。
3. 建模瓶颈:被 “胶水代码” 禁锢的算法灵活性
3.1. 核心矛盾
RLHF 远非一个固定的算法,它是一个仍在高速演进的研究领域。PPO 只是起点,DPO、IPO、KTO、DAPO 等新算法层出不穷。这些算法的共同特点是:它们改变了 Worker 之间的依赖关系和数据流。
例如:
- DPO:抛弃了独立的 Reward Model,直接在偏好数据上优化 Actor,这改变了数据源和损失函数的计算方式
- DAPO::在 PPO 的基础上,引入了一个额外的“偏好损失”项,这需要在标准的 PPO 流程中插入新的计算节点
- 更复杂的奖励机制:可能需要多个 Reward Model(例如,一个用于评估有用性,一个用于评估无害性),并将它们的输出进行加权组合
这些算法的共同特点是:它们改变了计算节点的数量、类型,以及节点之间的数据依赖关系。
然而,现有的 RLHF 框架大多采用 多控制器 (multi-controller) 范式。在这种范式下,每个模型(Actor, Critic 等)都由一个独立的分布式程序来管理。开发者必须在每个程序的代码中,手动处理复杂的集体通信(如 all_gather)和点对点通信,以协调数据流。
这种 “计算与通信深度嵌套” 的模式,导致整个系统变得极其僵化。当需要从 PPO 切换到 Safe-RLHF 时,开发者可能需要修改所有相关模型的代码,以适应新的 cost model 带来的数据流变化。
3.2. 分层混合编程模型
veRL 提出了一种分层混合编程模型,其思想精髓如下图所示:
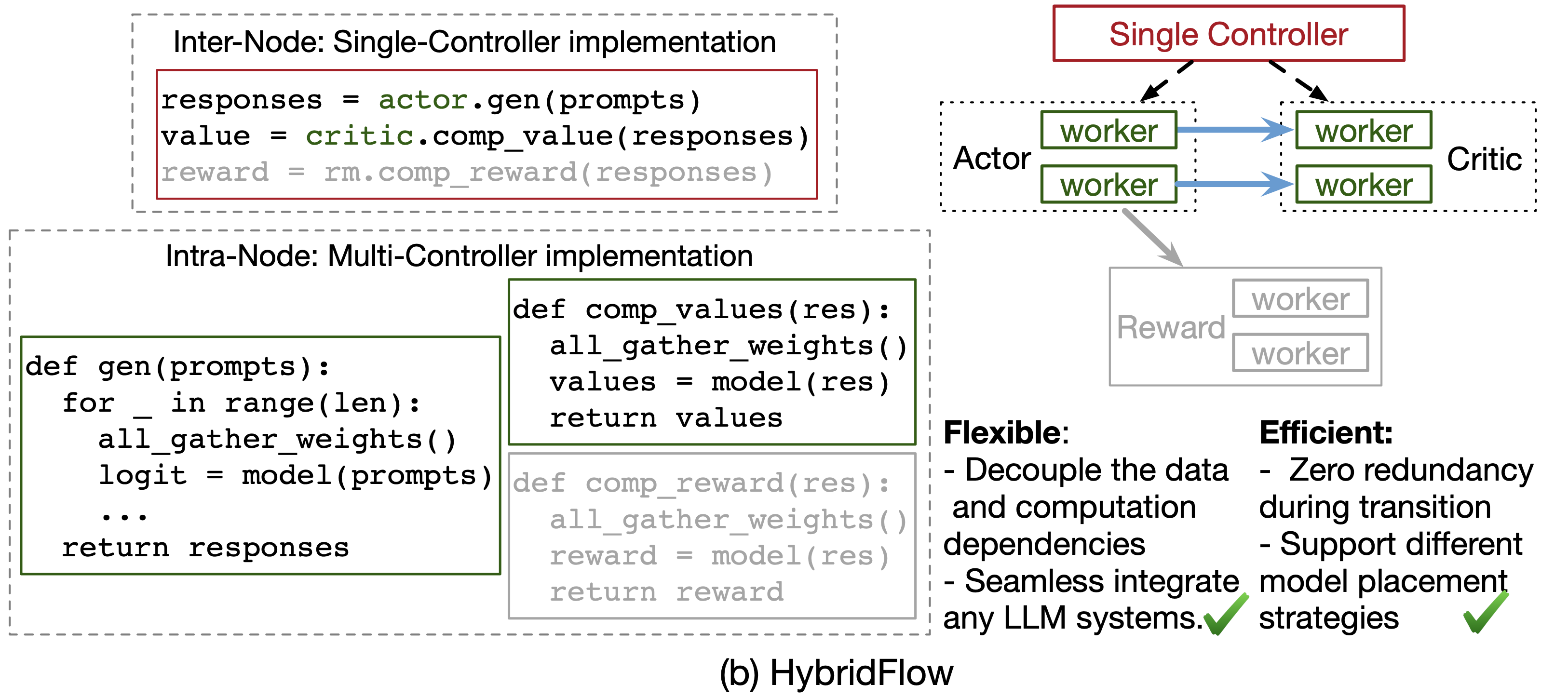
veRL 将系统解耦为两个层次:
上层:单控制器 (Single-Controller) 协调数据流
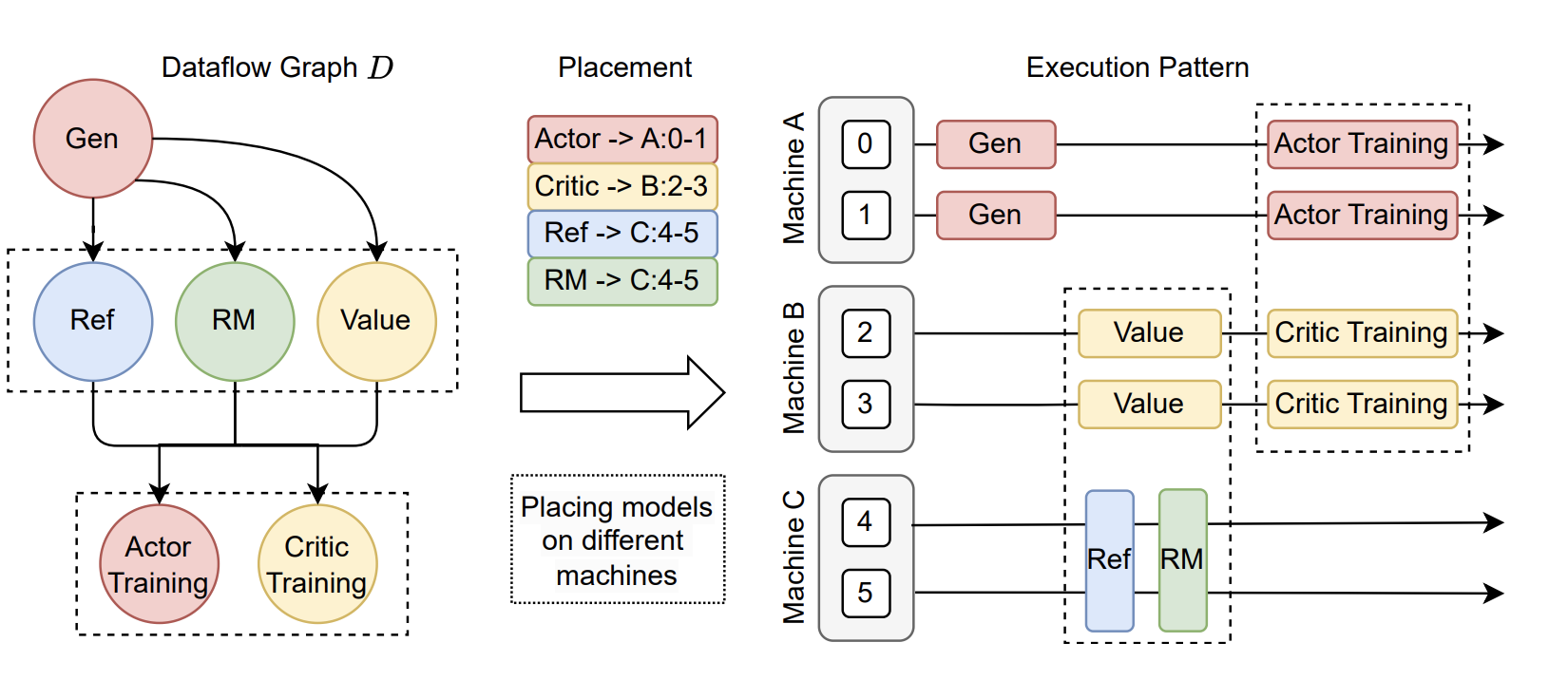
在这一层,整个 RLHF 流程被抽象为一个由多个逻辑模型节点构成的 数据流图 (Dataflow Graph)。开发者面对的是一组高层 API,如 actor.generate_sequences()、critic.compute_values()。他们可以用 简单的、顺序的 Python 代码来描述算法逻辑,就像在单机上编程一样。
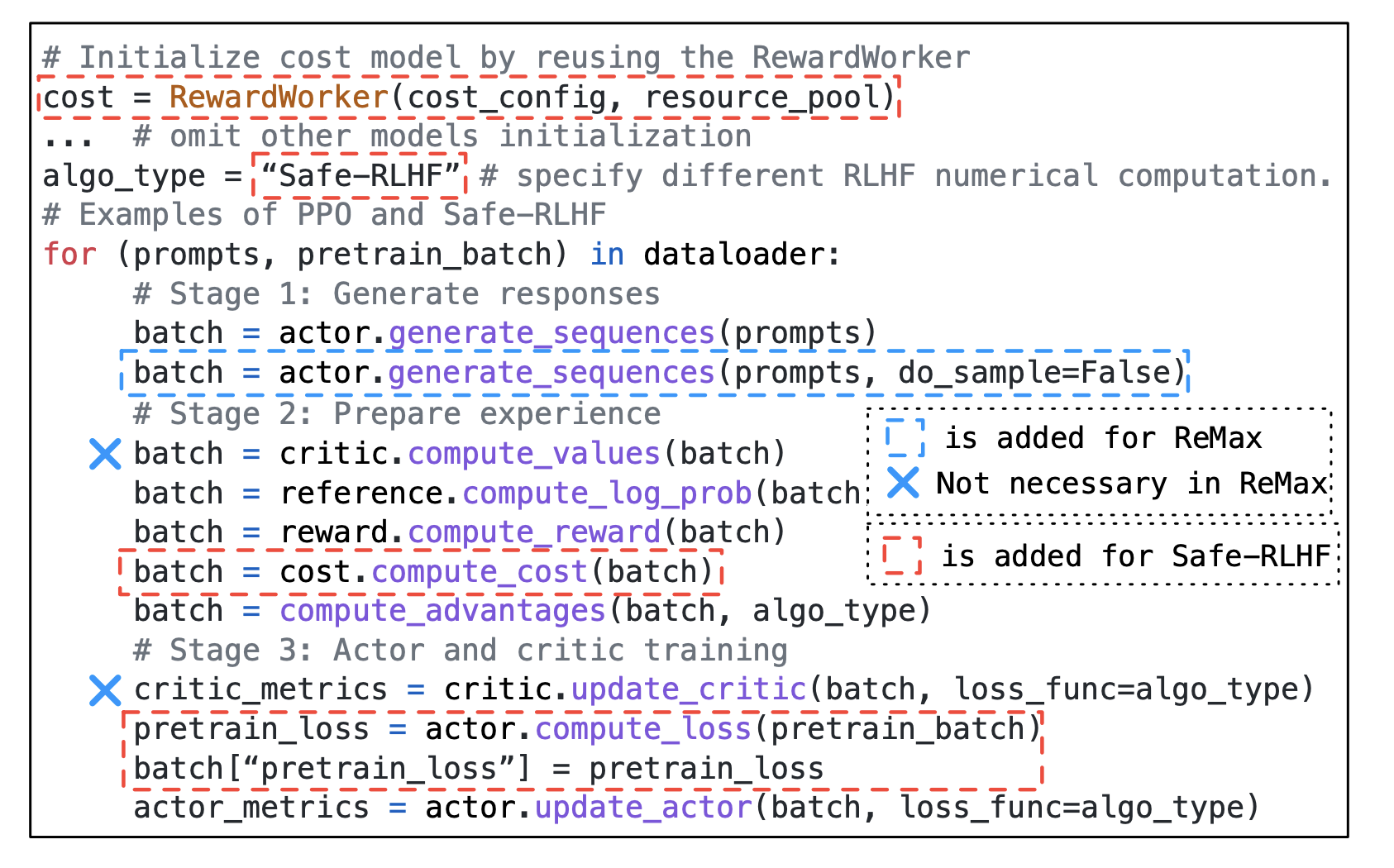
下图展示了这种模式的好处:从 PPO 切换到 ReMax 或 Safe-RLHF,真的只需要 增删或修改几行高层 API 调用 即可,无需关心底层的分布式实现。
下层:多控制器 (Multi-Controller) 执行分布式计算
在高层 API 的背后,每个模型节点(Worker)内部依然采用高效的多控制器范式。当 actor.update_actor() veRL 会自动地在分配给 Actor 的一组 GPU 上,执行一个高效的分布式训练任务(例如,由 Megatron-LM 驱动)。
这一层负责处理所有复杂的并行计算、梯度同步等,但其复杂性被完全封装在 Worker 内部,不会暴露给上层的算法逻辑开发者。
通过这种 “上层单控灵活编排,下层多控高效执行” 的分层设计,veRL 成功地 解耦了“算法逻辑”与“分布式实现”。这使得算法研究者可以专注于算法本身的创新,而系统工程师可以专注于底层计算的优化,两者互不干扰。
4. 资源瓶颈:被“静态绑定”浪费的 GPU
“不可能三角”的最后一个顶点,是资源利用效率。在动辄需要数百张 GPU 的 RLHF 训练中,每一分的 GPU 资源都极其宝贵。
4.1. 核心矛盾
RLHF 流程中的各个模型,其工作负载和资源需求是高度 异构 (heterogeneous) 的。 为了更好的对齐效果,实践中经常使用小尺寸的 Actor(例如 7B)搭配大尺寸的 Critic 和 Reward Model(例如 70B)。此外不同 Worker 的活跃时间也不同,Actor 在生成和训练阶段都活跃,而 Critic 和 Reward Model 只在准备(Preparation)和训练(Training)阶段的特定步骤中才参与计算。
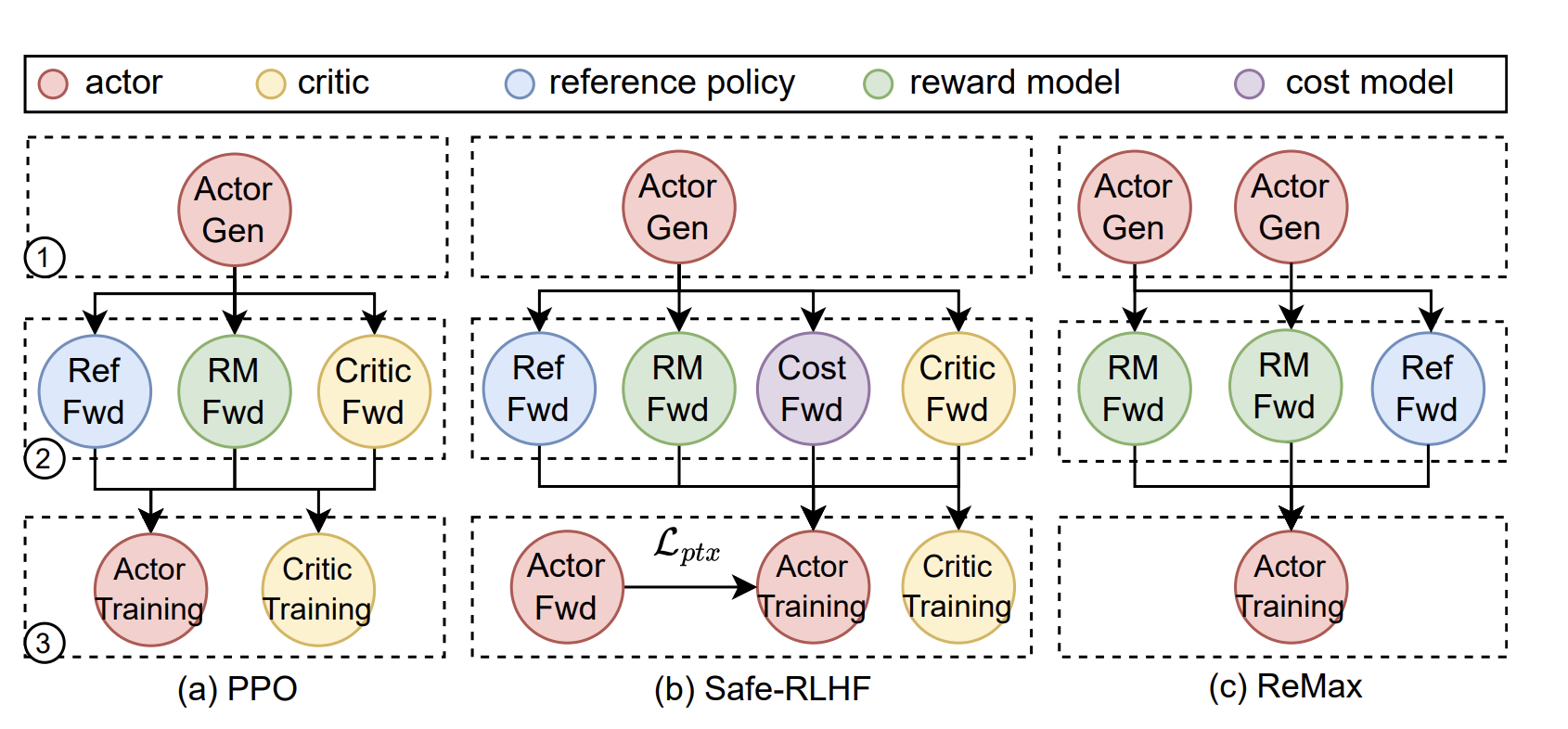
上图中阶段 1,2,3 分别表示生成(Generation)、准备(Preparation)和训练(Training)。
现有的 RLHF 框架(如 DeepSpeed-Chat, NeMo-Aligner)往往采用简单的 静态放置策略。例如:
- 完全共置 (Colocate):将所有模型放置在同一组 GPU 上,如 DeepSpeed-Chat。这种策略虽然最大化了 GPU 的“繁忙”时间,但由于不同模型的工作负载不均衡,会导致计算/通信效率低下,无法充分利用每张卡的算力。
- 完全分离 (Standalone):为每个模型分配独立的 GPU 资源,如 OpenRLHF。这种策略虽然可以为每个模型量身定制并行策略,但下图展示了其弊端:在 Rollout 阶段,分配给 Critic、Ref 和 RM 的 GPU 将 完全空闲。
这种一刀切式的静态资源绑定,无法适应 RLHF 任务的动态和异构特性。
4.2. veRL 的灵活放置与自动映射
veRL 的核心思想是 将模型放置(Placement)本身也视为一个可优化的变量。
veRL 首先将物理的 GPU 设备虚拟化为逻辑上的 ResourcePool。这是一个关键的解耦步骤,它将“计算任务”与“物理硬件”分离开来。 开发者可以决定如何将不同的 Worker 映射到不同的 ResourcePool 上。
- 映射到 同一个 ResourcePool 的模型,将实现 共置 (colocate),共享同一组 GPU 资源,并通过时间分片的方式顺序执行,以避免 OOM。
- 映射到 不同的 ResourcePool 的模型,将被部署在物理隔离的 GPU 上,它们的执行可以 自动并行。
手动配置模型放置策略仍然需要大量的专家经验。为此 veRL 提出了一个自动设备映射算法,该算法的目标是,在给定的硬件集群(总 GPU 数量 N,单机 GPU 数量 Q)和 RLHF 数据流图(模型 L 及其工作负载 W)下,自动搜索出能 最小化端到端延迟 的最优放置方案。
它的工作流程是这样的:
- 枚举放置计划 (Placement):算法首先枚举所有可能的模型划分方式(get_placements),例如,是
{Actor, Critic, RM}全部分离,还是{Actor, Ref}共置,{Critic, RM}共置。 - 枚举资源分配 (Allocation):对于每一种放置计划,算法会枚举所有可能的 GPU 资源分配方案(
enum_alloc)。 - 自动并行策略搜索 (Auto-Parallelism):在给定的放置和资源分配下,算法会为每个 Worker 调用一个 auto_parallel 模块,该模块利用一个 性能模拟器 (simu) 来搜索最优的并行策略(TP, PP, DP 的组合)。
- 成本估算与决策:最后,通过一个
d_cost函数估算整个数据流图的总延迟,并找出使延迟最小化的那一套完整的“放置+分配+并行”策略。
我们会在后续的源码解析部分来深入探究这里的流程,不过我认为目前 veRL 的自动并行策略搜索是一个非常有前景的方向,就像传统分布式中的自动并行一样,它可以大大降低 RLHF 系统的工程复杂度。
下图给了不同放置策略下 veRL 的吞吐:
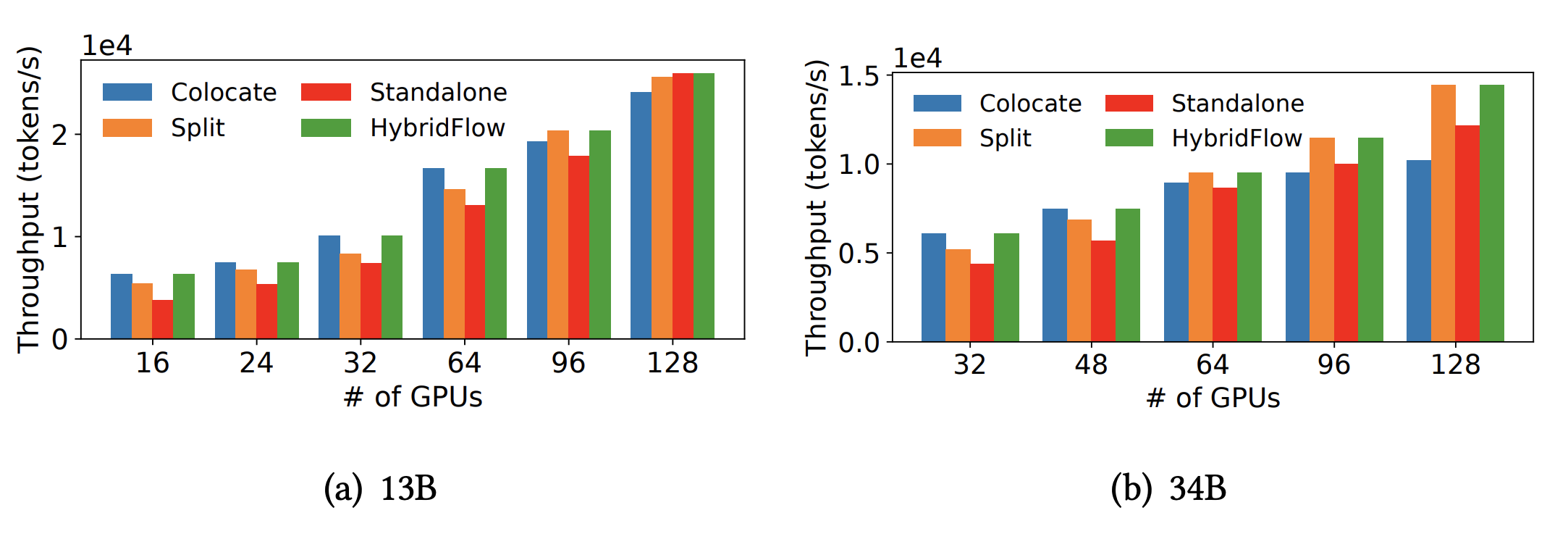
在小规模集群(< 96 GPU)上,算法倾向于选择 colocate 策略,以最大化 GPU 利用率。在超大规模集群(> 96 GPU)上,算法则会自动切换到 split 或 standalone 策略,因为此时通过任务并行获得的收益,已经超过了 GPU 阶段性空闲带来的损失。
5. 总结
回到我们最初提出的 RLHF 工程化“不可能三角”——极致的性能、灵活的建模、高效的资源利用。传统的 RLHF 框架,由于其“缝合”的本质,往往只能顾此失彼,在三者之间做出痛苦的妥协。
veRL 通过一套连贯的、分层的设计哲学,对整个 RLHF 流程进行了系统性的重构。
面对训练和推理异构并行导致的权重重组开销, veRL 提出了革命性的3D-HybridEngine。它通过精心设计的交叉并行分组策略,使得生成阶段可以直接复用训练阶段的权重分片,避免了全局 All-Gather,实现了最小化的通信开销。
面对算法快速演进带来的建模僵化问题,veRL 采用了 “上层单控,下层多控” 的分层编程模型。上层提供给算法开发者的是一套简洁、灵活的高层 API,可以像搭积木一样轻松构建和修改算法流程;下层则将复杂的分布式计算完全封装在 Worker 内部。这种 “逻辑与实现” 的彻底解耦,为算法的快速迭代提供了非常大的自由度。
面对 GPU 资源的巨大浪费,veRL 提供了从 “共置分时复用” 到 “分离并行执行” 的灵活放置选项,更设计了一套自动映射算法,能够根据硬件和模型特性,自动搜索出最优的“放置+分配+并行”组合策略。
在本系列接下来的文章中,我们将深入 veRL 的开源代码,逐一剖析这些颠覆性的思想是如何被转化为一行行精巧、高效的工程实现的,敬请期待。