ZB-VPP 编排代码解读
在上一篇博客中,我们介绍了 Zero Bubble VPP 的编排策略,本篇我们将深入代码,解读 Zero Bubble VPP 的编排实现。其中核心的代码都在 v_schedule.py 中。但是官方的实现,代码实在是有些难懂,给的超链接里面包含了我加的详细注释,希望能帮助大家理解。
编排的核心代码包含俩个主要函数,一个是 try_v_schedule,一个是 get_v_schedule。try_v_schedule 函数是 Zero Bubble VPP 的核心编排函数,它会尝试生成一个调度计划,get_v_schedule 函数则是调用 try_v_schedule 函数,尝试生成一个调度计划,并且会打印一些调度的统计信息。
1. try_v_schedule 函数
首先我们来看 try_v_schedule 函数,这个函数是 Zero Bubble VPP 的核心编排函数,它会尝试生成一个调度计划。
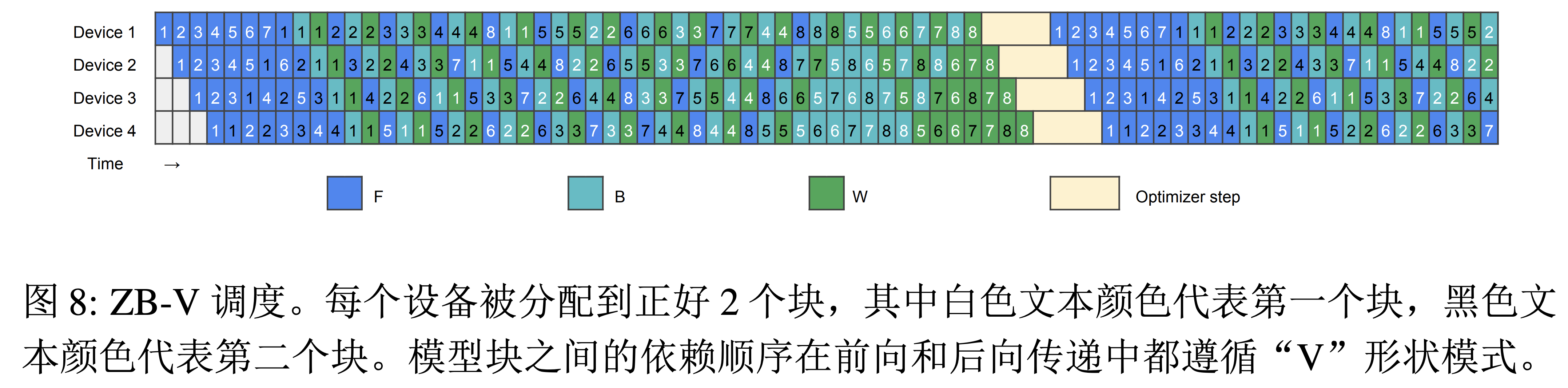
也就是生成一个类似图中的调度计划,其中包含了前向传播(F)、反向传播(B)和权重更新(W)任务,以及通信操作。这个函数的输入参数包括 fill_f 和 fill_b,分别表示是否填充前向传播和反向传播的泡沫。approved_bubble 是一个数组,表示每个stage的最大泡沫时间。
try_v_schedule 是类 PipelineGraph 的一个方法,这个类包含一些比较重要的参数:n_stage(stage数量)、n_micro(微批处理数量)、fbw_cost(前向、反向和权重更新任务的成本)、c_cost(通信成本)和 max_mem(最大内存)。zp-vpp 默认 fbw_cost 是 [1000, 1000,1000],c_cost 是 1。f_mem, b_mem, w_mem 分别是前向、反向和权重更新任务的内存占用。这三个参数是根据模型的 hidden_size, num_attention_heads 和 seq_length 估算出来的。
下面我们来具体看一下 try_v_schedule 函数的实现。 首先 try_v_schedule 函数会初始化一些变量,包括计数器 count、结束时间 end_time、当前时间 cur_time、内存 mem、stage泡沫时间 stage_bubble、待处理的 W 任务队列 pending_w、调度方案 schedule 和输出字符串 stage_str。
def try_v_schedule(self, fill_f=True, fill_b=True, approved_bubble=None):
# 初始化计数器count,对于每个stage都有6个计数器(对应F/B/W,每个有两个chunk)
count = []
for i in range(self.n_stage):
count.append([0] * 6)
# 初始化结束时间数组end_time,节点编号从0到n_node-1
end_time = [-1] * self.n_node
# 初始化当前时间cur_time为全0
cur_time = [0] * self.n_stage
# 初始化内存占用mem为全0
mem = [0] * self.n_stage
# 初始化每个stage的泡沫时间为全0
stage_bubble = [0] * self.n_stage
# 初始化待处理的W任务队列pending_w,每个stage一个
pending_w = [deque() for _ in range(self.n_stage)]
# 初始化调度方案schedule为n_stage个空列表
schedule = [[] for _ in range(self.n_stage)]
# 生成n_stage个用于输出的前缀字符串
stage_str = [" " * i for i in range(self.n_stage)]
# 如果approved_bubble为None,则初始化为n_stage个-1
if approved_bubble is None:
approved_bubble = [-1] * self.n_stage
# 计算approved_bubble中的最大值
max_approved_bubble = max(approved_bubble)
接着 try_v_schedule 函数定义了一个内部函数 get_max_stage_bubble,用于获取最大stage泡沫时间。
# 定义获取最大stage泡沫时间的函数
def get_max_stage_bubble(stage=-1):
max_stage_bubble = 0
for bb in stage_bubble:
max_stage_bubble = max(max_stage_bubble, bb)
# 如果给定了stage,则还需要考虑该stage的approved_bubble
if stage >= 0:
max_stage_bubble = max(
max_stage_bubble, max_approved_bubble - approved_bubble[stage])
return max_stage_bubble
为了方便的加入不同类型的任务,try_v_schedule 函数定义了一个内部函数 put,这个函数用于插入 F/B/W 任务。是一个比较核心的函数,下面我们来仔细看一下。
首先是函数的输入参数,cat 表示任务类型,0 为 F,1 为 B,2 为 W;chunk 表示任务块,0 为 chunk 0,1 为 chunk 1;stage 表示stage编号;assert_cnt 表示是否检查计数器。
# 定义插入F/B/W任务的函数
def put(cat, chunk, stage, assert_cnt=True):
"""
@param cat: 任务类型,0为F,1为B,2为W
@param chunk: 任务块,0为chunk 0,1为chunk 1
@param stage: stage编号
@param assert_cnt: 是否检查计数器
"""
task_end_time = _no_bubble = cur_time[stage] + self.fbw_cost[cat]
# Note: 为什么是 cat * 2 + chunk?
# 0 -> F0, 1 -> F1, 2 -> B0, 3 -> B1, 4 -> W0, 5 -> W1
# 默认 vpp degree 是 2,这里看起来需要后续需要修改为 cat * vpp_degree + chunk
_cnt = count[stage][cat * 2 + chunk]
# assert _cnt < self.n_micro
if _cnt >= self.n_micro:
if not assert_cnt:
stage_str[stage] += " "
cur_time[stage] = task_end_time # TODO
return
assert mem[stage] + self.fbw_mem[cat] <= self.max_mem
# 更新输出字符串, FfBbWw 分别代表 F/B/W 任务,后面的数字代表任务编号
stage_str[stage] += "FfBbWw"[cat * 2 + chunk] + \
str(_cnt + 1) + " " * (3 - len(str(_cnt + 1)))
count 是一个二维数组,用于记录每个stage的 F/B/W 任务的数量。end_time 是一个一维数组,用于记录每个任务的结束时间。cur_time 是一个一维数组,用于记录每个stage的当前时间。mem 是一个一维数组,用于记录每个stage的内存占用。stage_bubble 是一个一维数组,用于记录每个stage的泡沫时间。pending_w 是一个二维数组,用于记录每个stage待处理的 W 任务。schedule 是一个二维数组,用于记录调度方案。stage_str 是一个一维数组,用于记录输出字符串。
note
megatron 在做编排的时候是多卡的视角,对所有卡的任务进行编排。
这里需要注意一个问题就是为什么任务的索引是 cat \* 2 + chunk,这是因为 Zero Bubble VPP 中每个任务有俩个 chunk,所以需要乘以 2。如果后续需要适配 vpp_degree > 2 的逻辑,需要修改为 cat \* vpp_degree + chunk。
下一步就是更新当前任务的结束时间,这里需要考虑依赖任务是否完成。如果任务不是前向传播的第一个 chunk(即不是 F0_1),则需要检查依赖任务是否完成。计算依赖任务的标识,如果是前向或反向传播任务,确认其依赖的前一个任务已完成。对于权重更新任务,确认其依赖的反向传播任务已完成。
if cat > 0 or chunk > 0:
# 如果任务不是前向传播的第一个chunk(即不是F0_1),则需要检查依赖任务是否完成
last_id = cat * 2 + chunk - 1
# 计算依赖任务的标识
if cat < 2:
# 如果是前向或反向传播任务,确认其依赖的前一个任务已完成
assert end_time[self.get_id(
last_id // 2, last_id % 2, stage, _cnt)] >= 0
else:
# 对于权重更新任务,确认其依赖的反向传播任务已完成
assert end_time[self.get_id(1, chunk, stage, _cnt)] >= 0
如果如果是前向或反向传播的第一个chunk,需要等待前一个stage相应的任务完成。
if chunk == 0 and cat < 2:
# 如果是前向或反向传播的第一个chunk,需要等待前一个stage相应的任务完成
if stage > 0:
# 获取前一个stage的相应任务ID
_fa_id = self.get_id(cat, chunk, stage - 1, _cnt)
# 确保前一个stage的任务已完成
assert end_time[_fa_id] >= 0, f"{cat}, {chunk}, {stage}, {_cnt}"
# 更新当前任务的预计结束时间,考虑通信成本和任务本身的执行时间
task_end_time = max(task_end_time, end_time[_fa_id] + self.c_cost + self.fbw_cost[cat])
最后需要更新当前任务的结束时间,更新当前stage的时间,更新内存使用情况,将任务加入到当前stage的调度计划中,如果是反向传播任务,将对应的权重更新任务加入待处理队列,更新当前stage内指定类型和 chunk 的任务计数。
_id = self.get_id(cat, chunk, stage, _cnt)
# 为当前任务生成唯一ID
if count[stage][0] > 0:
# 如果在当前stage已经有任务被安排,则计算stage内的空闲时间(泡沫)
stage_bubble[stage] += task_end_time - _no_bubble
# 更新当前任务的结束时间
end_time[_id] = task_end_time
# 更新当前stage的时间,以反映新任务的安排
cur_time[stage] = task_end_time
# 更新内存使用情况
mem[stage] += self.fbw_mem[cat]
# 将任务加入到当前stage的调度计划中
schedule[stage].append((cat, chunk, _cnt))
if cat == 1:
# 如果是反向传播任务,将对应的权重更新任务加入待处理队列
pending_w[stage].append((2, chunk, _cnt))
# 更新当前stage内指定类型和chunk的任务计数
count[stage][cat * 2 + chunk] += 1
可以看到,put 函数主要是用于插入 F/B/W 任务,插入了一个任务后,会更新当前任务的结束时间,更新当前stage的时间,更新内存使用情况方便后续的任务插入。
put_w 函数用于插入权重更新任务,主要就是调用了 put 函数,插入权重更新任务后,会更新当前任务的结束时间,更新当前stage的时间,更新内存使用情况,将任务加入到当前stage的调度计划中,更新当前stage内指定类型和 chunk 的任务计数。
def put_w(stage):
assert len(pending_w[stage]) > 0
_, chunk_, _ = pending_w[stage].popleft()
put(2, chunk_, stage)
接下来就是具体的编排逻辑了,首先是插入前向传播任务,然后是插入反向传播任务,最后是插入权重更新任务。
# ------------------------------------------------
# 插入F任务的chunk 0
# ------------------------------------------------
for i in range(self.n_stage):
put(FORWARD, 0, i)
# ------------------------------------------------
# 从最后一个卡开始,插入F任务的chunk 1
# 结合 VPP 的图来理解,形状是一个 V 形状
# ------------------------------------------------
for i in range(self.n_stage - 1, -1, -1):
if i == self.n_stage - 1: # 最后一个卡直接插入F任务的chunk 1
put(FORWARD, 1, i) # 插入F任务的chunk 1
continue
tmp = end_time[self.get_id(0, 1, i + 1, 0)] + self.c_cost
# 如果 i 卡内存 mem[i] 加上 F 任务的内存占用小于最大内存,且当前时间 cur_time[i] 加上 F 任务的时间小于 tmp,且 F 任务的 chunk 0 数量小于 n_micro
# 则插入 F 任务的 chunk 0
while mem[i] + self.fbw_mem[FORWARD] * (2 + i * 2) <= self.max_mem and cur_time[i] + self.fbw_cost[FORWARD] <= tmp and count[i][0] < self.n_micro:
for j in range(i + 1):
put(FORWARD, 0, j) # 插入F任务的chunk 0
put(FORWARD, 1, i) # 插入F任务的chunk 1
首先是插入前向传播任务,首先插入 F 任务的 chunk 0,然后从最后一个卡开始,插入 F 任务的 chunk 1。
note
一定要结合图去看,要不很难懂这里的代码逻辑
下面是插入第一个backward之前的 F 任务
# ------------------------------------------------
# 插入第一个backward之前剩下的 F
# 形成 V 形
# ------------------------------------------------
iter_chunk_ = 0
end_tmp = 0
for i in range(self.n_stage):
if i == 0:
end_tmp = cur_time[0] + self.fbw_cost[1]
continue
tmp = end_tmp + self.c_cost
while count[i][0] + count[i][1] < count[i - 1][0] + count[i - 1][1] or count[i][1] <= count[i - 1][1] < self.n_micro:
for j in range(self.n_stage - 1, i - 1, -1):
if count[j][iter_chunk_] < self.n_micro:
put(FORWARD, iter_chunk_, j)
iter_chunk_ = 1 - iter_chunk_
逐步插入B和W任务,尽量填充泡沫。为什么这里是 2 * self.n_micro 呢?因为每个stage有两个 chunk,每个 chunk 最多有 n_micro 个任务。这里后续如果需要适配 vpp_degree > 2 的逻辑,就会变成 vpp_degree * self.n_micro
for _ in range(2 * self.n_micro):
...
接下来是用来编排稳定stage的编排逻辑,非常的绕,大概可以分为6步。
第一步是检查内存,如果不够就先处理 pending_w 队列。
# 1. 检查内存,如果不够就先处理 pending_w 队列
for i in range(self.n_stage):
while mem[i] + self.fbw_mem[BACKWARD] > self.max_mem:
assert len(pending_w[i]) > 0
put_w(i)
第二步是根据条件分别将每个stage插入 b0 或 b1 列表。
# Note(sonder): 这里默认也是 vpp_degree = 2,需要后续适配 vpp_degree > 2 的逻辑
b0_ranks, b1_ranks = [], []
# 2. 根据条件分别将每个stage插入b0或b1列表
for i in range(self.n_stage):
# 如果 B 任务的 chunk 1 数量大于等于 chunk 0 数量,则插入 b0_ranks
if count[i][3] >= count[i][2]:
b0_ranks.append(i)
elif i == self.n_stage - 1: # 如果是最后一个卡,则插入 b1_ranks
b1_ranks.append(i)
else:
fa_id = self.get_id(1, 1, i + 1, count[i][3])
if end_time[fa_id] >= 0 or count[i][2] >= self.n_micro:
b1_ranks.append(i)
else:
b0_ranks.append(i)
b0 和 b1 列表的插入顺序是有讲究的,先插入 b1_ranks 中的 B 任务,再插入 b0_ranks 中的 B 任务。
b_ranks = [] # B任务列表
# Node(sonder): 为什么要先加入 b1_ranks 再加入 b0_ranks?
# 因为 backward 依赖关系和 forward 是相反的,backward 的 chunk 0 依赖 chunk 1
# 3. 先插入b1_ranks中的B任务
# Note(sonder): 这里是倒序插入,再结合图看一下为啥是倒序插入
for i in reversed(b1_ranks):
b_ranks.append((i, 1)) # (stage编号, chunk编号)
# 4. 再插入b0_ranks中的B任务
for i in b0_ranks:
b_ranks.append((i, 0)) # (stage编号, chunk编号)
这里有一个值得注意的地方,为什么要先加入 b1_ranks 再加入 b0_ranks?因为 backward 依赖关系和 forward 是相反的,backward 的 chunk 0 依赖 chunk 1。
接下来是插入 B 任务,尽量填充泡沫。
# 5. 插入B任务,尽量填充泡沫
# Note(sonder): 单卡视角下,一次只会插入一个 B 任务 b0/b1
for i, _chunk_ in b_ranks:
fa_id = -1
if _chunk_ == 1 and i < self.n_stage - 1:
fa_id = self.get_id(1, 1, i + 1, count[i][3])
if _chunk_ == 0 and i > 0:
fa_id = self.get_id(1, 0, i - 1, count[i][2])
# 检查内存,如果不够就先处理pending_w队列
while len(pending_w[i]) > 0 and fa_id >= 0 and end_time[fa_id] + self.c_cost >= cur_time[i] + self.fbw_cost[2]:
# 填充泡沫
put_w(i)
if len(pending_w[i]) > 0 and end_time[fa_id] + self.c_cost - cur_time[i] > get_max_stage_bubble(i) - stage_bubble[i]:
# 如果泡沫时间大于0, 则尽量填充泡沫
if _chunk_ == 1: # 如果是 chunk 1, 则尽量填充泡沫
put_w(i)
elif fill_b: # 如果是 chunk 0, 则根据 fill_b 来决定是否填充泡沫
put_w(i)
put(BACKWARD, _chunk_, i) # 插入B任务
需要注意的是,单卡视角下,一次只会插入一个 B 任务 b0/b1。这里就是对应图里面插入 B_0_0 和 B_0_1 等任务的逻辑。
第6步是插入剩下的F任务,尽量填充泡沫。
# 6. 插入F任务,尽量填充泡沫
# Note(sonder): 单卡视角下,一次只会插入一个 F 任务
for i in range(self.n_stage):
# 该卡的 F1 都已经插入, 跳过
if count[i][1] >= self.n_micro:
continue
put_item = None
# 如果 F1 的数量大于等于 F0 的数量,则插入 F0
if count[i][1] >= count[i][0]:
put_item = 0
# 如果是最后一个卡,则插入 F1
elif i == self.n_stage - 1:
put_item = 1
else:
if end_time[self.get_id(0, 1, i + 1, count[i][1])] >= 0:
put_item = 1
elif count[i][0] < self.n_micro:
if i == 0:
put_item = 0
elif end_time[self.get_id(0, 0, i - 1, count[i][0])] >= 0:
put_item = 0
if put_item is None:
continue
# 检查内存,如果不够就先处理pending_w队列
while mem[i] + self.fbw_mem[FORWARD] > self.max_mem:
assert len(pending_w[i]) > 0
put_w(i)
fa_id = -1
if put_item == 0 and i > 0:
fa_id = self.get_id(0, 0, i - 1, count[i][0])
if put_item == 1 and i < self.n_stage - 1:
fa_id = self.get_id(0, 1, i + 1, count[i][1])
while len(pending_w[i]) > 0 and fa_id >= 0 and end_time[fa_id] + self.c_cost >= cur_time[i] + self.fbw_cost[2]:
# 用 w 来填充泡沫
put_w
但是源码这里用了一个比较别扭的写法,就是用了一个 put_item 变量来表示插入 F0 还是 F1。如果不照着图有可能会比较难理解。加上注释应该好理解多了。
在最后需要把没有 pop 出来的 W 任务处理掉。
# 处理没有 pop 出来的 W 任务
for i in range(self.n_stage):
while len(pending_w[i]) > 0:
put_w(i)
最后返回调度计划。
return schedule, end_time, get_max_stage_bubble()
这就是 Zero Bubble VPP 的核心编排函数 try_v_schedule 的实现。而 get_v_schedule 函数则是调用 try_v_schedule 函数,尝试生成一个调度计划。
2. get_v_schedule 函数
get_v_schedule 函数是调用 try_v_schedule 函数,尝试生成一个调度计划,它会尝试不同的填充策略,找到一个最小的泡沫时间。
def get_v_schedule(self, only_run_time=False):
# 初始化调度(计划执行顺序)、结束时间和最大空闲时间(泡沫)变量
schedule, end_time, max_bubble = None, None, None
# 根据前向和反向传播的成本以及微批处理数量计算预期时间
expected_time = sum(self.fbw_cost) * self.n_micro * 2
# 遍历前向填充和反向填充的所有组合
for fill_b in [True, False]:
for fill_f in [True, False]:
# 尝试生成一个调度计划
_schedule, _end_time, _max_bubble = self.try_v_schedule(
fill_b=fill_b, fill_f=fill_f
)
# 如果这是第一个调度或者找到了一个更小的泡沫,则更新调度计划
if max_bubble is None or _max_bubble < max_bubble:
max_bubble = _max_bubble
schedule = _schedule
end_time = _end_time
如果只需要运行时间,则返回总预期时间加上最大空闲时间。
# 如果只需要运行时间,则返回总预期时间加上最大空闲时间
if only_run_time:
return max_bubble + expected_time
接下来会计算泡沫率,了解调度的效率。
# 计算泡沫率,了解调度的效率
bubble_rate = max_bubble / (expected_time + max_bubble)
然后打印一些调度的统计信息。
# 打印一些调度的统计信息
print("%2d %3d, [%5d %5d %5d %5d], %6d -> %6.4f" %
(self.n_stage, self.n_micro, *self.fbw_cost, self.c_cost, self.max_mem // self.f_mem, bubble_rate))
接下来是为每个stage构建详细的执行顺序。
# 为每个stage构建详细的执行顺序
local_order = [[] for _ in range(self.n_stage)]
# 通信ID字典和计数器,用于管理通信操作的唯一性
comm_id = {}
comm_id_counter = 0
# 初始化后验证时间
post_validation_time = 0
# 从最后一个stage开始反向遍历每个stage
for i in range(self.n_stage - 1, -1, -1):
# 计算后验证ID
pv_id = min(2 * (self.n_stage - 1 - i), self.n_micro - 1)
# 更新后验证时间
post_validation_time = max(post_validation_time, end_time[self.get_id(
0, 0, i, pv_id)] - self.fbw_cost[0] - self.c_cost)
# 遍历发送、接收和无操作,为每个stage添加后验证节点
for it in ["RECV_", "SEND_", ""]:
# 跳过特定stage的不必要操作
if i == 0 and it == "SEND_":
continue
if i == self.n_stage - 1 and it == "RECV_":
continue
# 为当前stage添加后验证节点
stage_ = i
local_order[stage_].append(ScheduledNode(
type=it + "POST_VALIDATION",
chunk=0,
stage=stage_,
minibatch=0,
start_time=post_validation_time,
completion_time=post_validation_time,
))
# 更新通信ID
comm_id[local_order[stage_][-1]] = comm_id_counter
comm_id_counter += 1
主要功能是反向遍历每个stage,计算后验证时间,并根据条件跳过某些操作,为每个stage添加后验证节点,并更新通信ID。
接下来是遍历每个stage,根据调度添加计算节点。
# 遍历每个stage,根据调度添加计算节点
for i in range(self.n_stage):
for _cat_, _chunk_, _micro_ in schedule[i]:
# 计算完成时间
complete_time = end_time[self.get_id(
_cat_, _chunk_, i, _micro_)]
# 添加计算节点
local_order[i].append(ScheduledNode(
type="FBW"[_cat_],
chunk=_chunk_ if _cat_ == 0 else 1 - _chunk_,
stage=i,
minibatch=_micro_,
start_time=complete_time - self.fbw_cost[_cat_],
completion_time=complete_time,
))
# 如果是权重更新(W)则不需要通信
if _cat_ == 2: # 没有通信的情况
continue
# 定义前向或反向的通信操作
cat_str = "FORWARD" if _cat_ == 0 else "BACKWARD"
def communicate(send_recv, stage_):
# 添加通信节点
local_order[stage_].append(ScheduledNode(
type=send_recv + cat_str,
chunk=_chunk_ if _cat_ == 0 else 1 - _chunk_,
stage=stage_,
minibatch=_micro_,
start_time=complete_time,
completion_time=complete_time,
))
comm_id[local_order[stage_][-1]] = comm_id_counter
# 根据块的位置和stage管理发送和接收操作
if _chunk_ == 1 and i > 0:
communicate("SEND_", i)
communicate("RECV_", i - 1)
if _chunk_ == 0 and i < self.n_stage - 1:
communicate("SEND_", i)
communicate("RECV_", i + 1)
comm_id_counter += 1
这段代码的主要功能是遍历每个stage,根据调度添加计算节点和通信节点。
首先,它遍历每个stage,并对每个stage的调度进行遍历。对于每个调度,它计算完成时间,并添加一个计算节点到 local_order 列表中。节点的类型是 "FBW" 中的一个字符,取决于 _cat_ 的值。节点的 chunk 值取决于 _cat_ 的值,如果 _cat_为 0,则chunk为 _chunk_,否则为 1 - _chunk_。
然后,如果 _cat_ 为 2,表示这是一个权重更新操作,不需要通信,所以跳过当前循环。
接着,定义了一个函数communicate,用于添加通信节点。这个函数接受一个表示发送或接收的字符串和一个stage编号,然后添加一个通信节点到local_order列表中。
最后,根据 _chunk_ 的值和stage编号,决定是否需要添加发送和接收操作。如果 _chunk_ 为 1 且stage编号大于 0,那么添加发送操作和接收操作。如果 _chunk_ 为 0 且stage编号小于 self.n_stage - 1,那么也添加发送操作和接收操作。每添加一次操作,comm_id_counter 就增加 1。
在分布式计算中,数据需要在不同的计算节点之间进行传输。这里的 _chunk_ 可以理解为数据块的位置,i 是当前的计算stage。当 _chunk_ 为 1 且stage编号大于 0 时,表示数据块在当前stage的计算节点,需要将数据发送到下一个stage的计算节点,并从上一个stage的计算节点接收数据。当 _chunk_ 为 0 且stage编号小于 self.n_stage - 1 时,表示数据块不在当前stage的计算节点,需要将数据发送到下一个stage的计算节点,并从上一个stage的计算节点接收数据。
接下来需要对每个stage的节点进行排序,优先处理通信节点。
# 对每个stage的节点进行排序,优先处理通信节点
for rank in range(self.n_stage):
def even_breaker(x: ScheduledNode):
# 计算节点总是延迟
if x.type in ['F', 'B', 'W']:
return comm_id_counter
# 通信节点按它们的唯一通信ID排序
return comm_id[x]
local_order[rank] = list(sorted(
local_order[rank],
key=lambda x: (x.start_time, even_breaker(x))
))
# 如果接收操作与前一个计算节点重叠,则重新排序以优先执行接收,允许重叠
for i in range(len(local_order[rank])):
if i > 0 and local_order[rank][i - 1].type in {'F', 'B', 'W'} and \
local_order[rank][i].type.startswith('RECV') and \
"POST_VALIDATION" not in local_order[rank][i].type and \
local_order[rank][i].start_time <= local_order[rank][i - 1].completion_time:
local_order[rank][i], local_order[rank][i -
1] = local_order[rank][i - 1], local_order[rank][i]
这样处理的原因是因为计算节点总是延迟,通信节点按它们的唯一通信ID排序,如果接收操作与前一个计算节点重叠,则重新排序以优先执行接收,允许重叠。首先,定义了一个函数 even_breaker,该函数根据节点类型返回一个值。如果节点类型是'F'、'B'或'W'(代表计算节点),则返回 comm_id_counter(一个计数器)。如果节点是通信节点,它返回该节点的唯一通信ID。
然后,它对每个stage的节点进行排序。排序的关键是一个元组,包含节点的开始时间和 even_breaker 函数的返回值。这样,通信节点(具有较小的唯一通信ID)将优先于计算节点(具有较大的comm_id_counter)。
最后,它检查是否有接收操作与前一个计算节点重叠。如果有,它会重新排序这两个节点,使接收操作优先于计算节点。这是通过交换这两个节点在local_order列表中的位置来实现的。这样做的目的是允许接收操作与计算操作重叠,以提高效率。
由于 Zero Bubble VPP 中引入了 rollback 的机制,所以需要需要回滚的通信进行处理。
# 对需要回滚的通信进行处理
local_order_with_rollback = [[] for _ in range(self.n_stage)]
for rank in range(self.n_stage):
rollback_comm = set()
if rank > 0:
for node in local_order[rank - 1]:
if node.type == "POST_VALIDATION":
break
if node.type == "SEND_FORWARD":
assert node.chunk == 0
rollback_comm.add(node.minibatch)
for node in local_order[rank]:
if node.type == "RECV_FORWARD" and node.chunk == 0 and node.minibatch in rollback_comm:
rollback = True
rollback_comm.remove(node.minibatch)
else:
rollback = False
local_order_with_rollback[rank].append(ScheduledNode(
type=node.type,
chunk=node.chunk,
stage=node.stage,
minibatch=node.minibatch,
start_time=node.start_time,
completion_time=node.completion_time,
rollback=rollback,
))
这段代码的主要功能是处理需要回滚的通信。它首先创建一个新的列表 local_order_with_rollback 来存储处理后的结果。然后,它遍历每个stage(由rank表示),并创建一个集合 rollback_comm 来存储需要回滚的通信。
如果当前stage不是第一个stage,它会遍历前一个stage的所有节点。如果节点类型是 "POST_VALIDATION",则跳出循环。如果节点类型是"SEND_FORWARD" 并且chunk为0,那么将 minibatch 添加到 rollback_comm 集合中。
这段代码的目的是确定哪些通信操作需要回滚。在分布式系统中,如果一个stage(stage)发送了一个消息,但是在后续的处理中发现了错误,可能需要回滚这个发送操作。这就是为什么需要检查 "SEND_FORWARD" 类型的节点,并且只有当 chunk 为0(也就是说,这是一个新的消息,而不是一个已经分块的消息的一部分)时,才将 minibatch 添加到 rollback_comm 集合中。
另一方面,"POST_VALIDATION" 类型的节点表示一个stage已经完成了其工作并且已经验证了结果,所以如果遇到这种类型的节点,就没有必要继续检查前一个stage的其他节点,因此跳出循环。
3. 总结
Zero Bubble VPP 是一个用于分布式训练的调度器,它可以根据不同的填充策略生成一个调度计划。Zero Bubble VPP 的核心编排函数是 try_v_schedule,它会尝试生成一个调度计划。get_v_schedule 函数是调用 try_v_schedule 函数,尝试生成一个调度计划,它会尝试不同的填充策略,找到一个最小的泡沫时间。最后,它会对每个stage的节点进行排序,优先处理通信节点。由于 Zero Bubble VPP 中引入了 rollback 的机制,所以需要需要回滚的通信进行处理。