静态图执行过程
tip
本文在阅读 文章 时所做的笔记,主要是对静态图组网过程的理解。
全文结合 PaddlePaddle 的源码进行说明
在上一篇文章中,我们已经对 PaddlePaddle 的静态图组网过程有了一个大致的了解,这一篇文章我们将对静态图执行过程进行分析。 接下来我们从 Python 侧和 C++ 侧两个入口进行分析。
Python 侧入口
在组网完成以后,需要执行器执行 Program 进行训练。首先需要初始化一个 Executor,然后再通过 executor 运行 startup_program,进行参数的初始化,正式开始对网络的训练。 对应代码如下:
# Executor 只需要在静态图模式下使用
paddle.enable_static()
# 设置运行的设备
# use_cuda = True
# place = paddle.CUDAPlace(0) if use_cuda else paddle.CPUPlace()
# exe = paddle.static.Executor(place)
# 如果不设置place,PaddlePaddle会自动选择一个默认的设备
exe = paddle.static.Executor()
train_program = paddle.static.Program()
startup_program = paddle.static.Program()
with paddle.static.program_guard(train_program, startup_program):
data = paddle.static.data(name='X', shape=[None, 1], dtype='float32')
hidden = paddle.static.nn.fc(data, 10)
loss = paddle.mean(hidden)
paddle.optimizer.SGD(learning_rate=0.01).minimize(loss)
# 运行一次startup_program,初始化参数
# 不需要优化/编译 startup_program
exe.run(startup_program)
# 直接运行主程序,不需要编译
x = numpy.random.random(size=(10, 1)).astype('float32')
loss_data, = exe.run(train_program, feed={"X": x}, fetch_list=[loss.name])
# 或者也可以先编译主程序,然后再运行,参考 `CompiledProgram` 获取更多信息
compiled_prog = paddle.static.CompiledProgram(
train_program)
loss_data, = exe.run(compiled_prog, feed={"X": x}, fetch_list=[loss.name])
note
直接运行主程序和先编译主程序再运行有什么区别?
首先先解释一下什么是 startup_program, startup_program 是用来初始化参数的,比如初始化权重、偏置等。然后在进行后续的 run 操作。 在后续的 run 操作中,分为了俩种,一种是直接运行主程序,一种是先编译主程序再运行。先编译主程序的操作主要目的就是将你组好的网络,转换成底层的一些其他表达,在这个过程中会对网络去做很多的优化,比如去除一些不必要的计算,去除一些不必要的变量,去除一些不必要的操作等等。这些优化都是为了提升运行的效率。所以在运行的时候,如果你的网络比较复杂,建议使用 CompiledProgram 进行编译,这样可以提升运行的效率。
exe = Executor(place) 的作用是初始化一些变量,没有特别重要的内容,特别是这里并没有真正的创建执行器。 下面直接来看run方法的执行流程。
# https://github.com/PaddlePaddle/Paddle/blob/develop/python/paddle/fluid/executor.py#L1449
Executor.run
-> Executor._run_impl
-> _ExecutorCache._get_program_and_executor
-> nex_exe.run
note
Executor、StandaloneExecutor、ParallelExecutor 有什么区别?
这三个执行器其实是 Paddle 开发历史中的产物,Executor 是最初的执行器,后来为了支持多卡训练,又引入了 ParallelExecutor,后来为了统一接口,又引入了 StandaloneExecutor。StandaloneExecutor 也叫做新执行器,老的执行器已经不再推荐使用了,会在未来的版本中被移除。
Executor._run_impl 中有比较复杂的分支选择逻辑,会根据不同的配置或参数选择不同的执行器,如 Executor、StandaloneExecutor、ParallelExecutor,这里只介绍 StandaloneExecutor 的执行过程。其对应的相关代码为:
# Executor._run_impl
# https://github.com/PaddlePaddle/Paddle/blob/develop/python/paddle/fluid/executor.py#L1633
if self._enable_interpreter_core and _can_use_interpreter_core(program, self.place):
feed = self._update_feed(program, feed) # 如果Program中不包含相应的feed,就在这里去掉
program, new_exe = self._executor_cache.get_program_and_executor(
program, feed,
fetch_list, feed_var_name,
fetch_var_name, self.place, scope,
)
#添加feed相应的variable并设置其值
self._feed_data(program, feed, feed_var_name, scope)
...
return new_exe.run(
scope, list(feed.keys()), fetch_list, return_numpy
)
note
https://github.com/PaddlePaddle/Paddle/blob/develop/python/paddle/fluid/executor.py#L1484
里面的不同 Program (program._pipeline_opt、program._heter_pipeline_opt 等)是用来干什么的?
program._pipeline_opt 和 program._heter_pipeline_opt 都是 Paddle 里面用来处理流水线并行的,是在使用多机训练的时候用的。 program 中有很多类似这样的属性,根据这些属性就可以根据不同的业务模块,选择不同的执行体系。
对于 Program 和 Executor,是存在 cache 机制的,对于同一个 Program,我们会缓存它的执行器,缓存的key结构如下: program.desc.cached_hash_str() + _get_program_cache_key(feed, fetch_list) 这里key分为两部分,第一部分是 ProgramDesc 中 cached_hash_str 字段。
// https://github.com/PaddlePaddle/Paddle/blob/develop/paddle/fluid/framework/program_desc.cc#L260
desc_.SerializePartialToString(&serialize_str); //这里是ProgramDesc的protobuf序列化得到的字符串
cached_hash_str_ = std::to_string(XXH64(serialize_str.c_str(), serialize_str.size(), 1));
第二部分是程序接收的输入和输出,_get_program_cache_key(feed, fetch_list)。
每次调用 executor.run 的时候,如果 ExecutorCache(LruCache) 没有命中,就需要新建一个出来:
def _get_program_and_executor(self, cached_data):
# ... 略去一些参数初始化和其他执行器分支
program = _add_feed_fetch_ops(program=inner_program,
feed=feed,
fetch_list=fetch_list,
feed_var_name=feed_var_name,
fetch_var_name=fetch_var_name,
use_fetch_v2=True)
enable_inplace = True if build_strategy is None or build_strategy.enable_inplace else False
enable_addto = True if build_strategy is not None and build_strategy.enable_addto else False
if enable_inplace or enable_addto:
# inplace should skip feed and fetch var
skip_var_names = eval(_get_program_cache_key(feed, fetch_list))
_apply_inplace_addto_pass(program, enable_inplace, enable_addto,
skip_var_names)
new_program = program.clone()
new_exe = _StandaloneExecutor(place, new_program, scope)
return new_program, new_exe
在新建过程中,有两个对Program的修改:
- 添加了
feed和fetch op。对每个feed变量,都会添加一个feed op到global block;对每个fetch变量,都会添加一个fetch变量到global block。 - 对
Program开启了inplace和addto两个pass。这两个pass均与inplace`相关。
note
feed 和 fetch 是用来做什么的
feed 和 fetch 是提供给用户的输入和输出的接口,用户可以通过 feed 和 fetch 来指定输入和输出的变量。 在用户层面的代码中会指定 feed 和 fetch 的变量,然后在底层的执行器中会根据这些变量来添加 feed op 和 fetch op。
x = numpy.random.random(size=(10, 1)).astype('float32')
loss_data, = exe.run(train_program, feed={"X": x}, fetch_list=[loss.name])
比如上面的代码,feed 中的 X 就是 feed 变量,fetch_list 中的 loss.name 就是 fetch 变量。
到这里,程序在 python 侧的执行就结束了,接下来会调用 StandaloneExecutor 在 C++ 侧运行 Program。
总的来说,在 Python 侧,主要是创建 Program 和 Executor,然后调用 Executor.run 运行 Program。
C++ 侧入口
静态图相关概念
在解释静态图的执行过程之前,先来梳理一下之前涉及的一些与静态图相关的概念。首先对于静态图表示来说,最重要的是这些Desc后缀的类,它们是静态图的表示核心。在Python侧,我们为这些Desc定义了相应的接口类,便于在python侧进行组网操作。
在静态图执行的时候,这里的 OpDesc 和 VarDesc 就不能直接拿来使用了。因为它们缺少了重要的运行时信息,VarDesc 是不持有内存的,也就不保存数据。OpDesc 中是没有 kernel 相关的信息的,因而也不能得到具体的运算逻辑。运行时我们需要接触的两个对应的类型分别是 Variable 和 OperatorBase,它们分别持有了数据和计算逻辑。执行器的关键一步就是从这里静态图的描述信息到运行信息的转化。
OpFuncNode/Instruction 是新执行器在执行期间会用到的类,在概念上可以将其等价理解为 OperatorBase,不同在于附加了执行器运行期间需要的上下文信息
StandaloneExecutor
执行器的任务是根据给定的 ProgramDesc,执行其中包含的Op,返回最后的结果。执行器需要处理的事情:
- 变量(Variable)的创建、管理与释放
- 算子(OperatorBase)的创建、调度执行
现存的执行器有Executor、PE和新执行器。这里我们以新执行器的执行流程为主,其他执行器目前都不推荐使用了。新执行器的正式名称是 StandaloneExecutor。
class StandaloneExecutor {
public:
StandaloneExecutor(const platform::Place& place, const ProgramDesc& prog);
~StandaloneExecutor() {}
private:
platform::Place place_;
const ProgramDesc& prog_;
std::unordered_map<std::string, std::shared_ptr<InterpreterCore>> interpretercores_;
}
其中 place 是指定的运算设备,prog_ 是新执行器需要执行的 Program,InterpreterCore 是调度的核心。 这里的 interpretercores_ 类型是std::unordered_map<std::string, std::shared_ptr<InterpreterCore>>,用于缓存 InterpreterCore。缓存的key的结构是 feed:$feed,fetch:$fetch,scope:$scope
note
InterpreterCore 是一个解释器,它可以解释 PaddlePaddle 的程序并执行它们。InterpreterCore 还可以将程序转换为可执行的代码,并将其传递给底层的执行引擎。
StandaloneExecutor 首先尝试从 interpretercores_ 中查询是否已经存在相应的核心,如果没有就新建一个,否则返回已存在的核心。并在 run 方法中调用该核心执行 Program,因此新执行器的核心类其实是 InterpreterCore,StandaloneExecutor 本身的作用很小。
InterpreterCore的主要成员变量如下:

InterpreterCore 的 run 方法实现如下:
paddle::framework::FetchList InterpreterCore::Run(
const std::vector<std::string>& feed_names,
const std::vector<phi::DenseTensor>& feed_tensors) {
SetDeviceId(place_); // 指定运行设备,新执行器本身是只支持单机单卡运行Program的
CheckCUDAGraphBeforeRun(feed_names); //检查是否已经启动了CUDA图模式
#ifdef PADDLE_WITH_MKLDNN
platform::AttachPointerHashToMKLDNNKey(this, place_); // 附加指针哈希到MKLDNN key中
#endif
bool is_build = is_build_;
Prepare(feed_names, feed_tensors, is_build); // 准备运行所需的上下文信息
if (is_build) {
RunImpl(); // 当前Program应该是被动态图构建出来的,运行它的执行计算图的具体实现
}
if (HasLocalScope()) {
ClearLoDTensorArrayInLocalScope(); // 在本地作用域中清除LoD Tensor Array
}
// 将Fetch Tensor返回
auto* fetch_var = local_scope_->FindVar(interpreter::kFetchVarName); // 在本地作用域中查找Fetch Tensor
if (fetch_var) {
auto fetch_list = std::move(*fetch_var->GetMutable<framework::FetchList>()); // 获取Fetch Tensor
#ifdef PADDLE_WITH_CUDA
// 如果CUDA图模式已经启动
if (platform::IsCUDAGraphCapturing()) {
// 获取数据时会出错
PADDLE_ENFORCE_EQ(fetch_list.empty(),
true,
platform::errors::InvalidArgument(
"Cannot fetch data when using CUDA Graph."));
}
#endif
return fetch_list; // 返回Fetch Tensor
} else {
return {}; // 如果没有获取到Fetch Tensor则返回空列表
}
}
InterpreterCore 的执行有两个分支,一种是尚未 build 执行 build 过程,另一种是 build 完成直接执行 instruction 的 list。需要说明的是,在 build 过程中,会顺序的调用每个op run一次,因此对于一个刚创建的 InterpreterCore,不需要连续调用两次 run 方法,一次 build,一次运行。 最后 return 的时候,在 scope 中查找名叫 fetch 的变量,返回该变量给用户。
note
为什么需要这两个分支?这俩个分支有什么不一样的作用吗?
我们执行器的执行模式是先通过一次的预处理,在预处理的时候我们把很多可以复用的信息缓存下来,这样在后续的执行过程中就可以直接使用了,这样就可以减少很多重复的计算,提升执行效率。 如果不进行预处理,在跑网络的时候,很多事情都是需要边跑边做的,这样就会导致执行效率不高。但是对于网络的训练来说,我们每一轮的网络其实是一样的,只是输入的数据不一样,所以我们可以在第一轮的时候把这些可以复用的信息缓存下来,后续的执行就可以直接使用了。这里面最直接相关的就有 静态选Kernel 。原本的执行体系里面给 Op 去选 Kernel 也是一个耗费时间的问题,所以在预处理的时候如果可以把 Kernel 都选好,那么后续的执行就可以直接使用了。w
新执行器的执行过程过程可以分为两步:
- 预分析阶段:静态化运行时信息,分析变量生命周期,Op的依赖分析
- 调度执行阶段:异步调度、跨流同步、算子执行、依赖更新、变量回收
预分析阶段
tip
为什么需要预分析的阶段?
预分析的主要核心作用就是:考虑执行一个Op需要哪些信息?哪些信息是可以复用的。
对比最基础的 Executor 的实现,它的执行流程可以划分为以下几个步骤:
- 调用
OpRegistry::CreateOp(OpDesc)为每个 Op 实例化对应的OperatorBase - 调用
PrepareUnusedVars确定 Block 中的变量应该在第几个 Op 执行结束后回收 - 为 Block 中的每个 VarDesc 实例化对应的 Variable ,这些 Variable 尚未持有真正的数据
- 按顺序调用 Op->Run 方法,同时在 Op 执行结束后回收不需要用到的变量
- 创建
RuntimeContext:用于在 scope 中查找 op 需要的输入和输出变量 - 创建
ExecutionContext:用于kernel的选择和分发 - 选择运算 kernel
- 根据
GetExpectedKernelType进行数据类型转换 - 创建
RuntimeInferShapeContext:用于推导变量的维度和类型 - 调用
infer_shape - 执行
kernel进行运算
上述过程中的第三步和第四步,每次 Executor 运行的时候都需要执行一遍,这里面很多的操作都可以通过缓存的方式避免重复运算。预分析的过程就是静态化这些运行信息,加速执行的过程。
预分析的第二个作用是为了并行调度和变量回收的准备工作。
// 为Block中的每个VarDesc实例化对应的Variable,这些Variable尚未持有真正的数据,对应 Executor.3
paddle::framework::interpreter::BuildVariableScope(
block_, execution_config_, &var_scope_);
// 按顺序调用Op->Run方法,并缓存部分信息,对应Executor.4
std::vector<paddle::framework::OpFuncNode> op_func_nodes;
paddle::framework::interpreter::BuildOpFuncList(
place_,
block_,
execution_config_.skip_gc_vars,
&op_func_nodes,
&var_scope_,
execution_config_,
HasLocalScope(),
static_build_);
// 对于用户输入的变量,在 var_scope_ 中将他们设置为跳过 inplace 相关判断,避免修改用户的输入变量
SetFeedVarsInplaceSkip(feed_names);
// 分析并确定op间的依赖关系,记录gc信息,可以对应Executor.2
Convert(&op_func_nodes);
UpdateSyncOpNum();
if (static_build_) {
RunImpl();
}
is_build_ = true;
当前需要处理的 Program
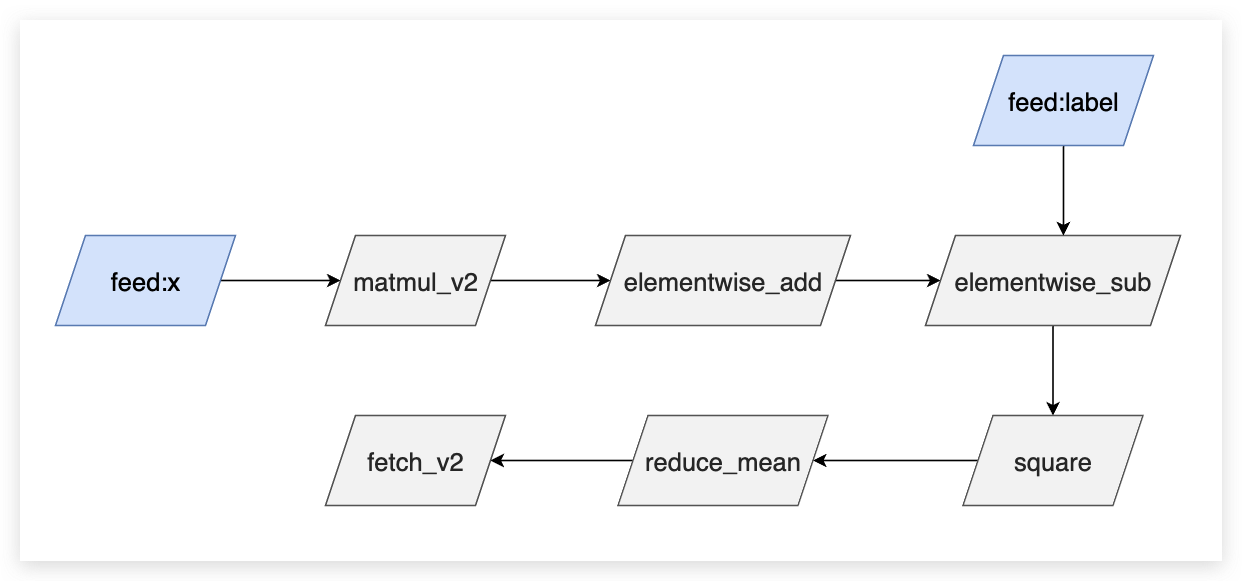
note
这个图其实不是一个完成的 Program , 图里面只画出了 Op 的依赖关系,并没有详细的画出每一个 Op 的输入输出变量。
上述代码里面有几个核心的点,分别是 BuildVariableScope、BuildOpFuncList、Convert。 下面分别介绍这三个函数的作用。
BuildVariableScope
note
为什么需要 BuildVariableScope ?
一个网络在执行的时候有几个关键点,一个是计算(Op),第二个就是数据,数据也就是变量。第三个就是数据在运行的时候,管理数据的东西叫做 Scope。所以在第一轮构建的时候,就需要把这几个东西构建起来。 现在的 Scope 都被处理成了列表的形式,也就是处理成 vector 的类型,这样我们在索引的时候就非常快。 但是这个东西其实现在也没有在用了,我们现在用回了最原始的 Scope,因为我们的执行器是会做缓存的,所有的变量都有指针,这些指针都会缓存到了 context 里面(Op在执行的时候都是通过一个 context 的数据结构去存储它)。 Op 在计算的时候直接从 Context 里面取就可以了。 BuildVariableScope 这部分的代码在后续也会被清理掉。
BuildVariableScope 的内部核心代码如下:
auto inner_scope = var_scope->GetMutableScope();
// created in var_scope.scope_ , and other scope is created in local scope.
// 这个 scope 是新执行器初始化时传入的 scope
Scope* local_scope = execution_config.create_local_scope
? var_scope->GetMutableLocalScope()
: var_scope->GetMutableScope();
// 遍历创建 block 的所有 VarDesc 并实例化为 Variable,加入到 scope 中
for (auto& var_desc : block.AllVars()) {
auto var_name = var_desc->Name();
if (var_name == framework::kEmptyVarName) {
continue;
}
if (var_desc->Persistable() ||
execution_config.force_root_scope_vars.count(var_name)) {
// 原则上,我们应该把所有可训练的参数放在全局作用域中,也就是作用域树的根。
// 有些情况下,比如量化会在全局范围内查找这些参数。
const Scope* ancestor_scope = inner_scope;
while (ancestor_scope->parent()) {
ancestor_scope = ancestor_scope->parent();
}
auto* ptr = const_cast<Scope*>(ancestor_scope)->Var(var_name);
// 如果 var 存在于 scope 中并且类型正确
// initializvariable 将不会创建一个新变量。
InitializeVariable(ptr, var_desc->GetType());
} else {
auto* ptr = local_scope->Var(var_name);
InitializeVariable(ptr, var_desc->GetType());
}
var_scope->AddVar(var_name, var_desc);
}
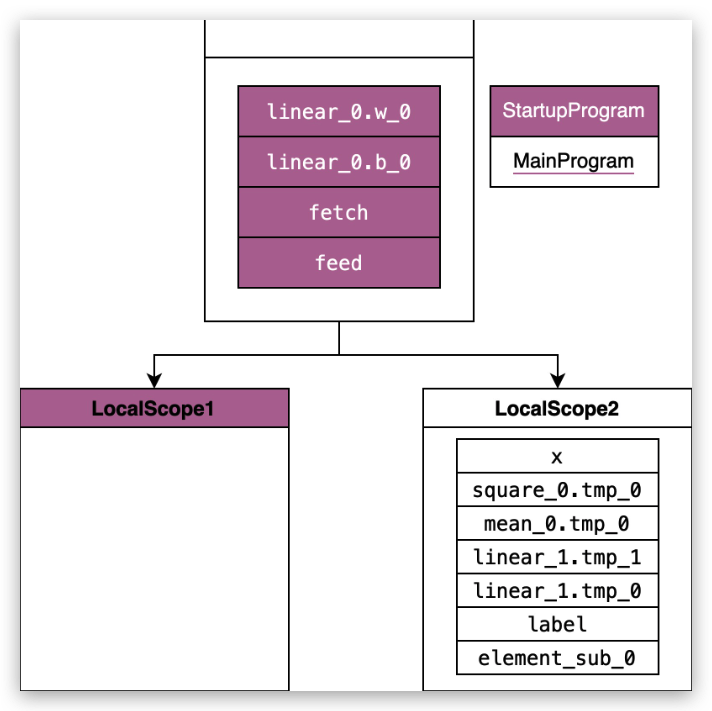
BuildVariableScope 遍历创建 block 的所有 VarDesc 并实例化为 Variable,加入到 scope 中。 scope 用于管理变量,op 在运行时从 scope 中查找输入和输出变量。
class Scope {
mutable std::unordered_map<std::string, std::unique_ptr<Variable>, KeyHasher> vars_;
mutable std::list<Scope*> kids_;
const Scope* parent_{nullptr};
}
scope 的底层数据结构是一个多叉树,树根这层用于保存 Parameter,也就是可训练的参数,第二层用于保存中间变量。一般执行器会默认传入的是树根这层,在树根的基础上自己创建一个 local_scope 并将运行期间产生的变量保存在 local_scope 中。
note
local_scope 这个设计有什么好处?
我们知道根 Scope 中有很多参数,比如模型的参数。这些数据一般是不会被删除的,在训练的过程中有一些临时变量是需要动态删除的,比如在训练过程中,我们会把一些临时变量放在 local_scope 中,这样在训练一轮后,可以把整个 local_scope 删除掉,这样就可以节省内存,也可以避免有些变量中漏删除的情况。
BuildOpFuncList
这一步的主要目标是确定运行时 Op 需要的一些信息,比如 kernel 选择。相关信息保存在数据结构 OpFuncNode 中。
OpFuncNode 的定义如下:
struct OpFuncNode {
int stream_priority_{0}; // lower value, higher priority
// fit for phi kernel
phi::Kernel* phi_kernel_{nullptr}; // not owned
platform::DeviceContext* dev_ctx_; // not owned
std::map<int, int> inplace_back_map;
std::map<std::string, std::vector<int>> input_index;
std::map<std::string, std::vector<int>> output_index;
std::shared_ptr<OperatorBase> operator_base_;
std::string execution_stream_{kDefaultStream};
OpFuncType type_; // 用于决定在哪个线程池上进行调度,一般根据 kernel.place 决定
OpKernelComputeFunc kernel_func_;
SchedulingPriority scheduling_priority_{0}; // lower value, higher priority
};
这一步的主要逻辑如下:
1、CreatorOps为每个Op实例化对应的OperatorBase
2、控制流op的内部变量的gc设置
如果前向 op 中的变量会被反向 op 用到,那么该变量最终会被设置为 skip_gc_vars,跳过 gc 步骤。
if (!used_for_jit) {
// If gc is enabled and block size > 1
const ProgramDesc& main_program = *block.Program();
operators::PrepareSafeEagerDeletionOnConditionalOpAndConditionalGradOp(
main_program, block.ID(), ops_unique);
operators::PrepareSafeEagerDeletionOnWhileOpAndWhileGradOp(
main_program, block.ID(), ops_unique);
operators::PrepareSafeEagerDeletionOnRecurrentOpAndRecurrentGradOp(
main_program, block.ID(), ops_unique);
}
3、 确定每个 op 执行结束后可以释放的变量的列表 unused_var_map
用于在预分析阶段进行变量 GC。从前向后遍历 op 的输入输出,更新变量的生存周期为相应 op 的 index。
std::unordered_map<const paddle::framework::OperatorBase*,
std::vector<std::string>>
GetUnusedVars(const BlockDesc& block,
const std::vector<std::shared_ptr<OperatorBase>>& ops) {
std::unordered_map<std::string, size_t> var_op_idx_map;
for (size_t i = 0; i < ops.size(); ++i) {
const auto& op = ops[i];
OpInOutInfo info;
// 判断输入是否可在此 op 执行后被回收
for (auto& name_pair : op->Inputs()) {
for (auto& name : name_pair.second) {
// 变量存在,不是可训练参数,类型为需要回收的类型
if (!var_can_be_deleted(name, block)) {
continue;
}
// 部分Op如reshape不需要具体的数据,只需要形状信息,
// 这时其输出变量的数据是不需要被回收的
if (!info.IsBuilt()) {
info.Build(op.get());
}
if (info.IsInArgBufferNeeded(name)) {
// Update the last living op of variable to current op
var_op_idx_map[name] = i;
} else {
<< name_pair.first << "(" << name << ") in Operator "
<< op->Type();
}
}
}
// 更新变量的存活周期
for (auto& name_pair : op->Outputs()) {
for (auto& name : name_pair.second) {
if (var_can_be_deleted(name, block)) {
// Update the last living op of variable to current op
var_op_idx_map[name] = i;
}
}
}
}
// 整理 name->op_index 到 op_index -> vector<name>
std::unordered_map<const OperatorBase*, std::vector<std::string>> result;
for (auto& name_op_idx_pair : var_op_idx_map) {
auto& name = name_op_idx_pair.first;
size_t op_idx = name_op_idx_pair.second;
auto op = ops[op_idx].get();
result[op].emplace_back(name);
}
return result;
4、 为每个op创建对应的OpFuncNode
第一步需要创建 BuildVariableMap
VariableScope 的成员如下:
std::vector<Variable*> var_list_;
std::map<std::string, int> name2id_;
// 变量的引用计数和是否可以inplace、var_desc
std::vector<VariableMetaInfo> vec_meta_info_;
Scope* scope_{nullptr};
Scope* local_scope_{nullptr};
// var_name -> var_type
std::vector<std::pair<std::string, int>> data_transfer_added_vars_;
VariableScope的作用和scope类似,区别在于它通过vector管理而非map。
Convert
Convert 这一步主要完成了下面几件事情:
- 依赖分析,构建调度关系: Convert 需要对计算图进行解析和分析,构建出每个算子的调度关系和执行顺序,以保证正确的计算顺序和结果。它会将每个算子与它的输入和输出之间的依赖关系分析出来,以构建执行图。
- 计算变量生存周期: Convert 还需要分析计算图中每个变量在程序的哪个阶段使用,以确定它的生存周期,从而确定内存使用策略。例如,对于只在某个算子中使用的中间结果,可以采用动态内存分配策略,而对于前向传播结果和反向传播结果等持久化结果,则需要采用静态内存分配策略。
- 缓存 Context: 在执行模型之前,需要将模型中的变量传输到设备上,这个过程称为上下文转换,如从CPU到GPU或多GPU之间。 Convert 还需要缓存中间变量和算子的 Context,以加速上下文转换和提高模型的训练和推理效率。
- 运行时的依赖计数和引用计数: Convert 将根据构建执行图的依赖关系,为每个变量进行依赖计数和引用计数的设置。这样一来,当某个变量不再被使用时,可以及时回收对应的内存空间,从而避免内存泄漏问题。
在 Paddle 的代码里 Convert 的实现是在 InterpreterCore::Convert 里面,下面我们来分析一下这个函数的实现。
// 一些初始化工作,包括给 Op 分配 dev_ctx
// 用于分析Op间的依赖关系,帮助后续对Op执行进行调度,方便并发执行
BuildOperatorDependences();
stream_analyzer_.ConstructEvents(&vec_instruction_);
// 计算变量的生存周期
// 这里略去代码,详见后续分析
// 缓存Context
for (size_t i = 0; i < vec_instruction_.size(); ++i) {
BuildAndCacheInstructionCtx(&vec_instruction_[i]);
}
// 运行时的依赖计数和引用计数
for (auto& dep : dependecy_count_) {
deps_.emplace_back(std::make_shared<interpreter::OpDepInfo>(dep));
}
for (size_t i = 0; i < vec_meta_info.size(); ++i) {
refs_.emplace_back(std::make_shared<interpreter::VarRefInfo>(
vec_meta_info[i].var_ref_count_, var_scope_.VarRef(i)));
}
可以看到,Convert 主要完成了上面提到的四件事情,下面我们来分析一下这四件事情的具体实现。
BuildOperatorDependences
这一步的作用是进行依赖分析,最终目标是建立 Instruction 之间的 DAG图,便于后续并行调度。Instruction 中包含了上一步中建立的 OpFuncNode 作为成员变量,它是调度的一个基础单位。 Instruction的图结构是一种邻接链表的方式存储的,每个节点存储他能到达邻居节点。我们希望确定如果一个op执行完了,接下来哪些op的输入准备好了,怎么去调度这些op。
note
DAG图是有向无环图(Directed Acyclic Graph)的简称,它是一种图论结构。DAG图是一些点和线的集合,其中点表示计算或操作,线表示它们之间的依赖关系。
Instruction 的结构如下:
class Instruction {
...
private:
...
std::vector<size_t> next_instrs_in_different_thread;
std::vector<size_t> next_instrs_in_same_thread;
std::shared_ptr<EventInter> event_to_record_;
std::vector<EventInter> events_to_wait_;
OpFuncNode op_func_node_;
const platform::DeviceContext& dev_ctx_; // not owned
std::shared_ptr<RuntimeContext> runtime_ctx_;
std::shared_ptr<RuntimeInferShapeContext> infershape_ctx_;
std::shared_ptr<ExecutionContext> execution_ctx_;
std::vector<size_t> gc_check_vars_;
std::vector<std::pair<Variable*, Variable*>> vec_inplace_in_to_out_;
}
其中 next_instrs_in_different_thread 和 next_instrs_in_same_thread 分别表示不同线程和同一线程中下一个执行。 这些信息都会被用于构建执行图。
一个 Instruction 的后继节点按照这两个 Op 的关系被分为三类,这三类后继节点在调度时不会有特殊处理。这一步的最终目的就是完成这个数据结构的构建,用于后续的并行调度中。整体过程可以大致分为两步:
- 依赖分析:确定Op执行的先后关系
- 调度策略:确定后继节点的调度类型
void InterpreterCore::BuildOperatorDependences() {
// 依赖分析:构建节点之间的依赖关系,设置依赖计数和引用计数
// 获取节点的数量
size_t instr_num = vec_instruction_.size();
// 初始化节点的依赖计数和引用计数
dependecy_count_ = std::vector<size_t>(instr_num, 0);
// 调用 dependency_builder_ 对象的 Build 函数,确定 Op 执行的先后关系 构建节点之间的依赖关系
auto downstream_map = dependency_builder_.Build(vec_instruction_);
// 遍历每个节点,设置其对应的下一步节点列表和依赖计数
for (size_t instr_id = 0; instr_id < instr_num; ++instr_id) {
// 获取当前访问的节点
Instruction& cur_instr = vec_instruction_[instr_id];
// 获取当前节点的下一步节点列表
const std::set<size_t>& next_instr_ids = downstream_map[instr_id];
// 根据节点类型,将下一步节点分为同步和异步两种类型
if (FLAGS_new_executor_serial_run) {
// 在同一线程内运行的异步节点
for (size_t next_instr_id : next_instr_ids) {
cur_instr.AddNextInstrInSameThread(next_instr_id);
}
} else {
if (cur_instr.KernelType() == OpFuncType::kGpuAsync) {
// 异步运行的异步节点
for (size_t next_instr_id : next_instr_ids) {
if (vec_instruction_[next_instr_id].KernelType() ==
OpFuncType::kGpuAsync) {
cur_instr.AddNextInstrInSameThread(next_instr_id);
} else {
cur_instr.AddNextInstrInDifferentThread(next_instr_id);
}
}
} else {
// 同步运行的异步和同步节点
bool has_instr_in_same_thread = false;
for (size_t next_instr_id : next_instr_ids) {
if (!has_instr_in_same_thread &&
vec_instruction_[next_instr_id].KernelType() !=
OpFuncType::kGpuAsync) {
cur_instr.AddNextInstrInSameThread(next_instr_id);
has_instr_in_same_thread = true;
} else {
cur_instr.AddNextInstrInDifferentThread(next_instr_id);
}
}
}
}
// 确定op的依赖计数, 即入度数
for (size_t next_instr_id : next_instr_ids) {
++dependecy_count_[next_instr_id];
}
}
}
我们可以看到这段代码主要完成了以下几个任务:
- 对计算图进行依赖分析,构建节点之间的依赖关系,为每个算子设置相应的依赖计数和引用计数;
- 根据计算节点的类型(同步/异步),将下一步节点列表分为同步和异步两种类型;
- 确定op的依赖计数, 即入度数
依赖分析
下面我们来看一下依赖分析的具体实现。
const std::map<size_t, std::set<size_t>>& DependencyBuilder::Build(
const std::vector<Instruction>& instructions) {
if (is_build_) {
return op_downstream_map_;
}
instructions_ = &instructions;
op_num_ = instructions_->size();
ops_before_.assign(op_num_, {});
ops_behind_.assign(op_num_, {});
op_happens_before_.assign(op_num_, std::vector<bool>(op_num_, false));
// 主要目的是得到这样的一个数据结构 Dict[OpIndex -> IndexOfAllOpDependsOnIt]
// 这一步结束后已经具备了一个DAG图
BuildDownstreamMap();
// 去除DAG图中对调度而言不必要的边
ShrinkDownstreamMap();
// 部分Op会带来一些隐式依赖,如随机数算子(如uniform_random), 这些算子需要单独处理
if (FLAGS_new_executor_sequential_run) {
AddDependencyForSequentialRun();
}
AddDependencyForCoalesceTensorOp();
if (FLAGS_add_dependency_for_communication_op) {
AddDependencyForCommunicationOp();
}
AddDependencyForRandomOp();
AddDependencyForReadOp();
is_build_ = true;
return op_downstream_map_;
}
那么 DAG 是如何构建的呢? DAG 的构建主要遵循以下规则:
- 情况1
A writes X
B reads X
then A -> B
- 情况2
//some other ops writes X
A reads X
B writes X
then A -> B
此时依然要保证A在B前面执行,因为A读取的值不应该是B写入的值
- 情况3
A writes X
//some other ops reads X
B writes X
then A -> B
在根据上述规则构建 DAG 图之后,我们还需要消去多余的依赖。比如我们构建了一个依赖边 a->b->c ,此时 c 依赖 a 和 b,但是只要保证它在 b 后面执行即可,不需要额外保证在 a 后面执行。因此保留依赖 a->b 和 b->c,去掉 a->c。
确认调度策略
在依赖分析完成之后,我们获得了一个 DAG 图。 之后我们需要确认调度的策略,看看那些 Op 是可以并行执行的,那些 Op 是需要串行执行的。
tip
什么情况下两个Op的执行需要同步?
当它们存在依赖关系又可能异步执行的时候,比如 A writes x, B reads x 这种关系的时候。这时候需要保证B执行的时候A已经执行完了。
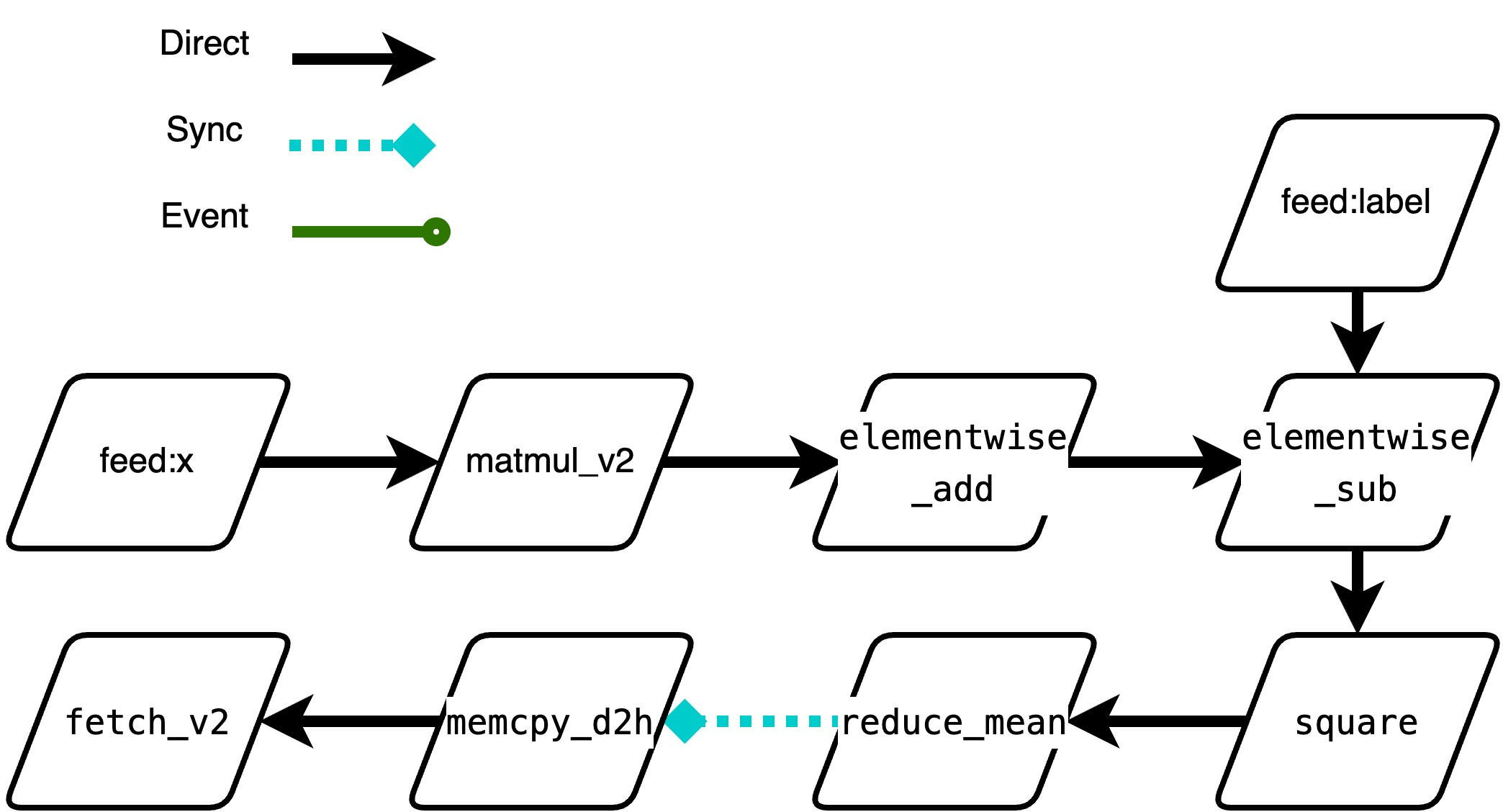
新执行器会按下面的分类把Op分为三类,后续调度时的逻辑略有不同。
- direct_run:串行情况,表示可以在当前线程直接拉起,不需要切换线程。目前包含如下 4 种情况:
a. GPU -> GPU(same stream) b. CPU -> CPU c. CPU -> H2D d. D2H -> CPU - synchornize_run: 并行,后续Intruction是个昂贵的同步等待操作,建议放到单独一个线程执行,如:
a. GPU -> D2H,因为 GPUKernel很快拉起后,可能在stream排队,下游D2H需要等待数据,且此操作是个sync操作 - event_run:并行,后续 Instruction 与当前Op不属于一个stream流,需要额外处理
a. H2D -> GPU b. GPU -> GPU(different stream)
note
什么是 Events ???
小节
预分析阶段有三个主要任务:
- 静态化信息:context缓存、运行时的数据类型转换改为插入op、kernel的选择
- 分析变量生命周期,确定在op执行结束后需要检查哪些变量的引用计数
- 依赖分析,确定在op执行结束后需要检查哪些op的依赖计数
调度执行阶段
InterpreterCore 在 build 结束后的执行逻辑中,需要关注的比较重要的部分要两点:
- 后继op的调度执行
- 多流同步下的显存回收
// lazy initialization of gc, do not create gc is the program only run once
if (!gc_) {
// 在这里面选择具体的 GC策略,由设备类型和 flag 控制
// 下面分析时考虑目前默认的 InterpreterCoreFastGarbageCollector 策略
gc_ = CreateInterpreterCoreGarbageCollector(place_, vec_instruction_);
}
interpreter::ResetAtomicGuard guard(&deps_, &refs_);
if ((execution_config_.used_for_jit || execution_config_.used_for_cinn) &&
(sync_op_num_ == 0)) {
VLOG(4) << "Tracing Instruction List";
TraceInstructionList(vec_instruction_);
} else {
VLOG(4) << "Non-tracing";
// For the program that only run once, it is no need to
// create work_queue, so the async_work_queue_ is created
// until the second step run.
async_work_queue_ = GetWorkQueue();
ExecuteInstructionList(vec_instruction_);
}
note
什么是 GC ?
GC (Garbage Collection,垃圾回收)策略是指在计算机程序中,用于管理动态分配的内存的策略。在许多编程语言中,程序员需要手动分配和释放内存。如果程序员不合理地分配或释放内存,可能会导致内存泄漏或指针错误等问题。而垃圾回收机制则可以自动地管理内存分配和释放过程,使得程序员无需手动管理内存,并且程序的内存使用更加稳定可靠。
note
Paddle 中的 GC 策略是什么样的?
Op 的整体调度过程
启动过程的代码如下
void InterpreterCore::ExecuteInstructionList(
const std::vector<Instruction>& vec_instr) {
unfinished_op_number_ = vec_instr.size();
if (unfinished_op_number_ == 0) {
VLOG(4) << "No op to run, return";
return;
}
exception_holder_.Clear();
for (size_t i = 0; i < dependecy_count_.size(); ++i) {
if (dependecy_count_[i] == 0) {
// 记录从设备到主机的数据传输(D2H)
RecordMemcpyD2H(vec_instr.at(i));
if (FLAGS_new_executor_serial_run) {
RunInstructionAsync(i);
} else {
// 运行异步 op
async_work_queue_->AddTask(vec_instr.at(i).KernelType(),
[this, i] { RunInstructionAsync(i); });
}
}
}
// 进入阻塞状态,等待其他线程的完成
auto event_name = main_thread_blocker_.WaitEvent();
VLOG(1) << "main_thread_blocker_(" << &main_thread_blocker_
<< ") got event_name: " << event_name;
// 异常处理部分省略 ...
}
这里的执行可以分为三步:
- 初始化工作,包括重置运行时依赖计数和引用计数的
dynamic_ref_ - 将每个一开始就可以执行的 Op 加入执行队列,具体运行每个 Op 的函数是 RunInstructionAsync
- 等待所有任务运行完成。这里会调用
main_thread_blocker_.WaitEvent进入阻塞,等待其他线程发现任务执行完成或失败后再退出
对于新执行器而言,他可以多线程地并发执行多个 Op,这里的 async_work_queue_ 会将op调度到不同的线程上。workqueue 的底层结构是线程池,线程池进行调度。 特殊之处在于新执行器会有两个不同的线程池,分别用于设备线程和 host 线程。线程池负责调度执行已经加入队列的任务,具体的执行的逻辑为 RunInstructionAsync ,它是线程循环执行的函数。 下面我们来看一下 RunInstructionAsync 的实现逻辑:
void InterpreterCore::RunInstructionAsync(size_t instr_id) {
SchedulingQueue ready_ops(instruction_scheduling_priority_less);
ready_ops.push(instr_id);
while (!ready_ops.empty()) {
instr_id = ready_ops.top();
ready_ops.pop();
auto& instr_node = vec_instruction_.at(instr_id);
// 执行单个Op的具体逻辑,具体见下一节分析,对op的调度执行不关键
RunInstruction(instr_node);
if (UNLIKELY(exception_holder_.IsCaught())) {
VLOG(4) << "Exception caught";
if (exception_notifier_ != nullptr) {
exception_notifier_->NotifyEvent();
}
return;
}
VLOG(4) << "unfinished_op_number_: " << unfinished_op_number_;
if (UNLIKELY(unfinished_op_number_.fetch_sub(
1, std::memory_order_relaxed) == 1)) {
if (completion_notifier_ != nullptr) {
completion_notifier_->NotifyEvent();
}
}
RunNextInstructions(instr_node, &ready_ops);
}
}
可以看到这里首先在一个空的执行队列中压入当前需要执行的 Op,然后开始执行 for 循环,运行当前 op,在运行完成后这里如果发现现在没有需要执行的 Op 了,那么就会调用 notify,通知其他线程和主线程结束。如果还有未完成 Op,进入RunNextInstructions,向执行队列中加入新的Op或把他们调度到别的地方去。
void InterpreterCore::RunNextInstructions(const Instruction& instr,
SchedulingQueue* reserved_next_ops) {
platform::RecordEvent record(
"RunNextInstructions", platform::TracerEventType::UserDefined, 10);
// 用于判断下一个 Op 是不是准备好了
// 通过其依赖计数判断。不管判断成不成功,依赖计数都会减一
auto IsReady = [this](size_t next_id) {
VLOG(4) << "op_id: " << next_id
<< ", remain deps: " << deps_[next_id]->DynamicDep();
return deps_[next_id]->CheckAndDecrease();
};
// 在其他线程中的
for (size_t next_instr_id : instr.NextInstrsInDifferenceThread()) {
if (IsReady(next_instr_id)) {
async_work_queue_->AddTask(
vec_instruction_[next_instr_id].KernelType(),
[this, next_instr_id]() { RunInstructionAsync(next_instr_id); });
}
}
// 在相同线程中的
for (size_t next_instr_id : instr.NextInstrsInSameThread()) {
if (IsReady(next_instr_id)) {
reserved_next_ops->push(next_instr_id);
}
}
}
在进行调度的时候, 会根据 Op 的类型,将 Op 分为两类,一类是在同一个线程中执行的,一类是在不同线程中执行的。对于同一个线程中执行的 Op,会将其加入到 reserved_next_ops 中,等待下一次调度。对于不同线程中执行的 Op,会将其加入到 async_work_queue_ 中,等待线程池调度执行。
note
和原来的有什么不同? 为什么要进行这样的修改?
单个 Op 的执行过程
这部分逻辑位于RunInstructionAsync中,但是和调度无关。下面是相关代码:
void InterpreterCore::RunInstruction(const Instruction& instr_node) {
VLOG(5) << ...;
auto* op = instr_node.OpBase();
platform::RecordEvent instruction_event(
op->Type(), platform::TracerEventType::Operator, 1);
SetDeviceId(instr_node.DeviceContext().GetPlace());
try {
// 判断Op的前置要求是否完成
// 与前面对stream的分析有关,执行cudaEventWait
instr_node.WaitEvent(place_);
if (!instr_node.IsArtificial()) {
// 运行Op的主体部分
RunOperator(instr_node);
// 回收变量
CheckGC(instr_node);
// 记录表明Op已经完成
interpreter::LogDeviceMemoryStats(place_);
}
instr_node.RecordEvent(place_);
} catch ... // 略去异常处理的代码
}
首先我们先来分析一下 RunOperator :
void InterpreterCore::RunOperator(const Instruction& instr_node) {
auto* op = instr_node.OpBase();
auto place = instr_node.DeviceContext().GetPlace();
Scope* local_scope = HasLocalScope() ? var_scope_.GetMutableLocalScope()
: var_scope_.GetMutableScope();
VLOG(4) << "Start run " << place << " " << op->DebugStringEx(local_scope);
auto op_with_kernel = dynamic_cast<const framework::OperatorWithKernel*>(op);
{
// If it is OperatorBase, InferShape do nothing.
if (op_with_kernel != nullptr) {
platform::RecordEvent infershape_event(
"infer_shape",
platform::TracerEventType::OperatorInner,
1,
platform::EventRole::kInnerOp);
// see OperatorWithKernel::RunImpl in operator.cc for why
if (!(op_with_kernel->HasAttr(kAllKernelsMustComputeRuntimeShape) &&
op_with_kernel->Attr<bool>(kAllKernelsMustComputeRuntimeShape))) {
op_with_kernel->Info().infer_shape_(
instr_node.InnerInferShapeContext().get());
}
infershape_event.End();
platform::RecordOpInfoSupplement(op->Type(),
op->Attrs(),
*(instr_node.InnerInferShapeContext()),
*(instr_node.InnerRuntimeContext()),
op->Id());
}
}
if (op_with_kernel != nullptr && FLAGS_new_executor_use_inplace) {
// TODO(xiongkun03) Does operator base support inplace ?
for (auto& pair : instr_node.InplaceInfo()) {
const auto& in = paddle::framework::details::GetTensorFromVar(pair.first);
auto* out =
paddle::framework::details::GetMutableTensorFromVar(pair.second);
if (in.dims() == out->dims()) {
out->ShareBufferWith(in);
}
}
}
{
platform::RecordEvent compute_event(
"compute",
platform::TracerEventType::OperatorInner,
1,
platform::EventRole::kInnerOp);
if (op_with_kernel == nullptr) { // operator base
instr_node.OpBase()->Run(*local_scope, place_);
} else {
phi::Kernel* kernel = instr_node.PhiKernel();
if (kernel && kernel->IsValid()) { // phi kernel
if (kernel->GetKernelRegisteredType() ==
phi::KernelRegisteredType::FUNCTION) {
VLOG(4) << "Run function kernel: " << op->Type();
VLOG(4) << instr_node.InnerRuntimeContext().get() << " "
<< &instr_node.DeviceContext();
phi::KernelContext phi_kernel_context;
op_with_kernel->BuildPhiKernelContext(
*instr_node.InnerRuntimeContext().get(),
const_cast<platform::DeviceContext*>(&instr_node.DeviceContext()),
&phi_kernel_context);
(*kernel)(&phi_kernel_context);
} else {
VLOG(4) << "Run structure kernel: " << op->Type();
(*kernel)(instr_node.InnerExecutionContext().get());
}
} else { // fluid kernel
instr_node.KernelFunc()(*instr_node.InnerExecutionContext().get());
}
}
}
VLOG(4) << "End run " << place << " " << op->DebugStringEx(local_scope);
if (!instr_node.InplaceBackMap().empty()) {
platform::RecordEvent inplaceback_event(
"InplaceVarsBack", platform::TracerEventType::UserDefined, 10);
auto& m = instr_node.InplaceBackMap();
// NOTE(zhiqiu): same logic as TransferInplaceVarsBack() in operator.cc
for (auto& p : m) {
auto* transformed_tensor = GetMutableLoDTensorOrSelectedRowsValueFromVar(
var_scope_.VarRef(p.first));
auto* original_tensor = GetMutableLoDTensorOrSelectedRowsValueFromVar(
var_scope_.VarRef(p.second));
original_tensor->ShareDataWith(*transformed_tensor);
VLOG(4) << "Transfer inplace variable back form "
<< var_scope_.GetNameById(p.first) << " to "
<< var_scope_.GetNameById(p.second);
}
}
/*For profiling/benchmark only*/
if (FLAGS_benchmark) {
instr_node.DeviceContext().Wait();
#if defined(PADDLE_WITH_CUDA) || defined(PADDLE_WITH_HIP)
PADDLE_ENFORCE_GPU_SUCCESS(platform::GpuGetLastError());
VLOG(4) << "Operator(" << op->Type()
<< "): context wait and get last error";
#endif
}
// for debug nan/inf
if (op_with_kernel != nullptr && FLAGS_check_nan_inf) {
VLOG(4) << "Check nan/inf";
framework::details::CheckOpHasNanOrInf(
*op,
*local_scope,
place); // TODO(xiongkun03) change it to inner scope.
}
}
具体来说,它首先获取当前算子以及它所需要运行的设备;然后根据算子是否有kernel,分别进行shape推导和计算
它执行以下几个步骤:
- 首先通过instrnode获取需要运行的operator,并获取它所需要的设备。
- 根据此operator的类型,判断它是否具有kernel。
- 如果不是
OperatorWithKernel类型,则说明此operator不需要运行kernel,只需要运行RunImpl函数即可。 - 如果是
OperatorWithKernel类型,则需要进行shape推导和计算, 运行infershape函数推导出每个输入输出的shape。若该 operator 的所有 kernel 都必须计算 runtime shape,则直接跳过 shape 推导。最后通过platform::RecordOpInfoSupplement函数收集关于此operator的信息,供后续跟踪和调试。
- 如果不是
- 根据命令行参数 FLAGS_newexecutor_use_inplace 判断是否启用 inplace。 若启用,则将所有inplace的变量的结果从 transformed_tensor 转移回 original_tensor。
- 运行 operator 的 kernel 函数。如果 operator 没有 kernel,直接运行 Run 函数。 如果 operator 有 kernel:若 kernel 是
phi::kernel,则需要检查它是否是函数类型,然后分别为执行上下文和kernel构建 phi kernel context。如果不是 phi kernel,则直接运行 kernel 的运算函数。 - 将 inplace 变量的结果传回 original_tensor。
可以看到新执行器在Op运行时少了很多准备工作,这里主要是Context的准备和数据转换相关逻辑。 接下来分析GC部分 CheckGC 。
void InterpreterCore::CheckGC(const Instruction& instr) {
// 检查是否要进行垃圾回收,并记录事件
platform::RecordEvent record(
"CheckGC", platform::TracerEventType::UserDefined, 10);
// 如果定义了 PADDLEWITHCUDA 或 PADDLEWITHHIP,则调用 RecordStreamForGC 函数
#if defined(PADDLEWITHCUDA) || defined(PADDLEWITHHIP)
RecordStreamForGC(instr);
#endif
auto& varscope = varscope;
// 遍历所有需要进行垃圾回收的变量
for (auto varid : instr.GCCheckVars()) {
// 打印当前变量名、变量 ID 和引用数量
VLOG(4) << "GC:" << varscope.GetNameById(varid) << ", id:" << varid
<< ", ref:" << refs[varid]->DynamicRef();
// 减少该变量的引用计数并返回是否可以进行删除
bool isready = refsvar_id->CheckAndDecrease();
// 如果该变量属于持久变量,则直接跳过
if (varscope.VarDesc(varid) && varscope.VarDesc(varid)->Persistable()) {
continue;
}
// 如果可以进行删除,则异步删除该变量
if (isready) {
VLOG(6) << "Async delete variable with name : "
<< varscope.GetNameById(varid);
gc->Add(refs[varid]->Var(), instr);
}
}
}
这里的代码主要包含两部分:
Record StreamGC,为了多流下的FastGC服务- 更新变量的引用计数,回收引用计数为0的变量
代码中 RecordStreamGC 为了 提前回收显存服务 的。如果 kernel1 和 kernel2 使用同一个 stream 执行,那么在 kernel1 还没跑完的时候就可以标记 kernel1 使用的内存已经被释放,然后 kernel2 就可以直接使用这部分显存。这样做的前提是要保证释放的显存不会分配给其他 kernel 使用,因此这里在分配内存时,不同 stream 会有不同的独立显存块分配。 ???
新执行器默认会的GC策略FastGC会在Op执行结束后回收变量,对于异步类型的Op而言,上面提到提前释放不需要特殊实现就可实现,但是注意到这种提前释放需要一个重要前提,就是前后的kernel必须使用同一个stream执行。 如果stream是同一个,那么这里不需要做特殊处理,直接GC回收即可。但是如果stream不是同一个,那么就需要插入cudaEvent同步。
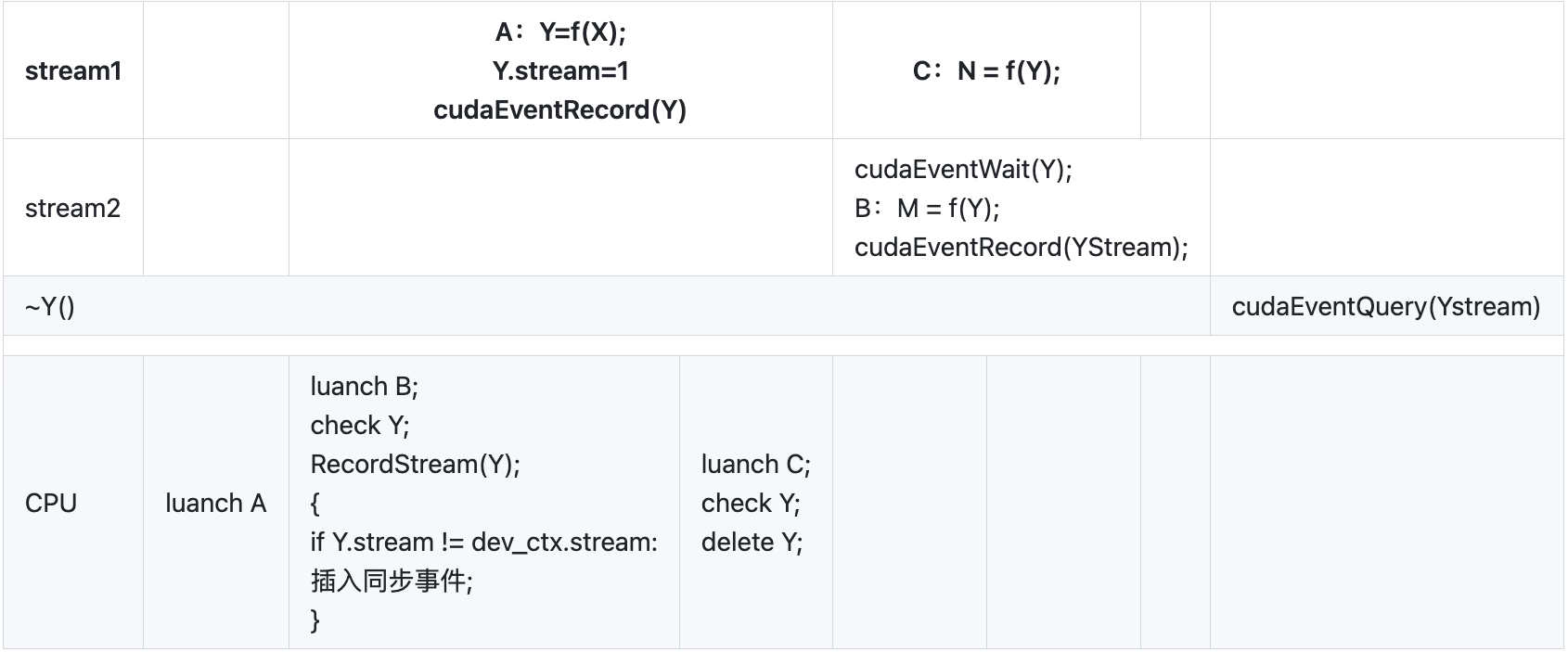
多流同步实例
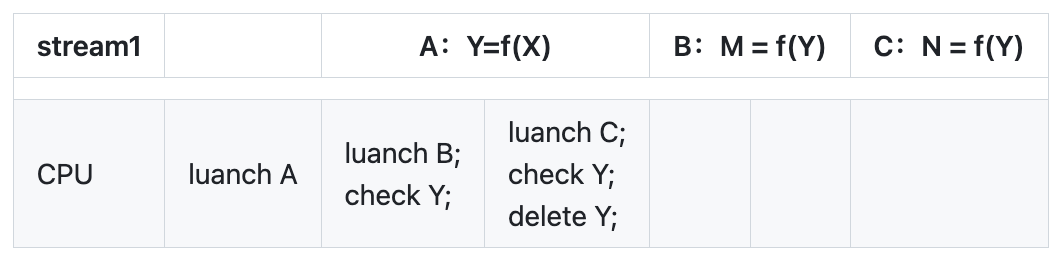
1、同一个stream 的FastGC
A:Y = f(X)
B: M = f(Y)
C: N = f(Y)
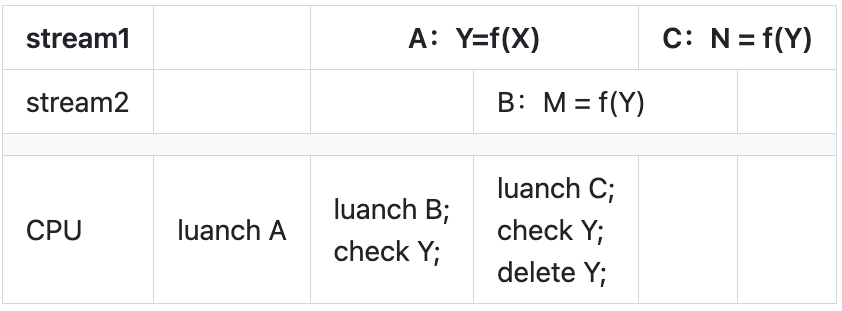
2、不同stream直接FastGC引起的冲突
3、A->B、A->C stream_ananlyser插入同步事件的逻辑
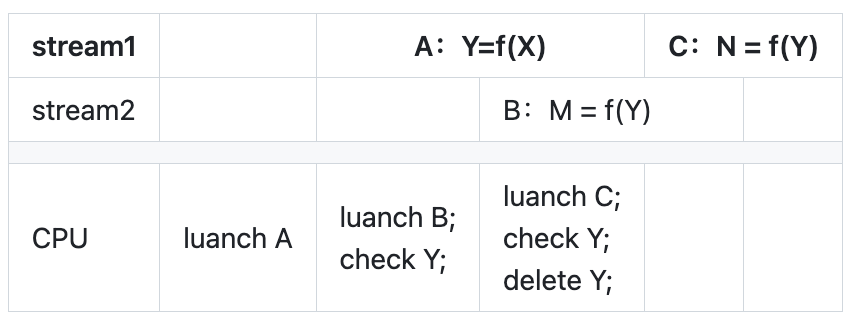
注意到上面的例子中有个问题,M = fc(Y) 在 Y=fc(X) 未执行完之前就开始执行了,这种情况下调度的正确性是由之前的 stream_ananlyser` 来保证的。 举例来说,这里检测到Y和M有依赖关系,而它们的 stream 又不是同一个,就会插入 cudaEvent 进行同步。
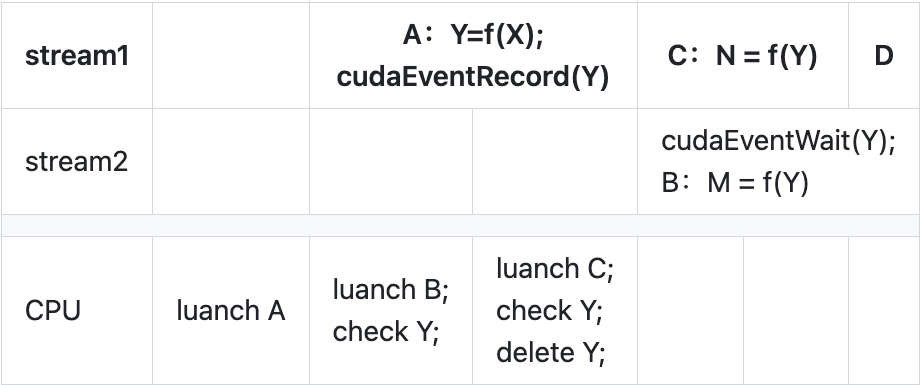
4、A->B、A->C RecordStreamGC插入同步事件的逻辑
小节
1、调度后继op,将其加入到对应类型的线程池中
2、 执行算子
3、回收变量
4、对于跨流的特殊处理