Glancing: 基于全局和局部特征比较的异常定位
note
论文:Glancing at the Patch: Anomaly Localization with Global and Local Feature Comparison(CVPR2021)
论文简介
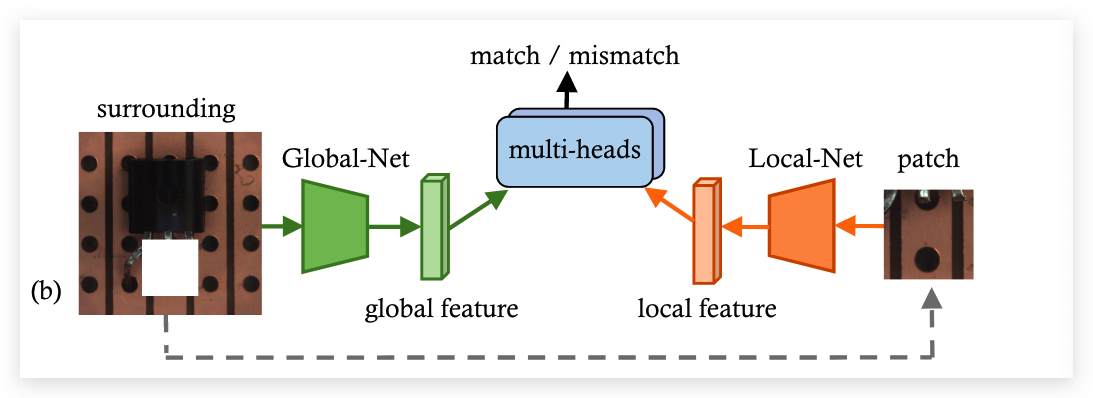
该篇论文提出了一种基于全局和局部特征比较的异常定位算法。具体来说就是有一个提取全局特征的网络Global-Net和提取局部特征的网络Local-Net,通过比较两个网络提取出来的特征的差距来进行异常检测和定位。流程如下图所示:
关键技术
局部和全局特征的提取
局部特征提取
用于局部特征提取的网络是一个轻量级的网络 Local-Net。由于之前有很多的工作证明,在ImageNet上预训练的模型学习到的特征能够被用于异常检测。Local-Net 首先使用一个预训练的Resnet-18进行知识蒸馏,然后再在训练集上进行微调。 知识蒸馏的损失如下:
和 分别表示Local-Net和Teacher网络。 表示 l2 距离。除了知识蒸馏损失项之外还有一个损失项 表示密度损失。
全局特征提取
Global-Net被用来做全局特征的提取。Local-Net负责提取图像中一个Patch内容的特征,Global-Net就将把Patch部分遮住的图像作为输入。为了防止局部的特种干扰全局的特征,论文使用了局部卷积。 局部卷积的操作可以被如下定义:
上面的公式中, 表示点积。 表示输入的特征图, 是二值化的mask。对于没有一个pooling layer,特征图都会被normal pooling更新,同时 会更新为经过pooling之后的二值化mask。初始的时候 patch的地方是0其他的地方都是1。 这样是为了让 Global-Net 不看patch的内容也能够提取到全局的特征。
说了半天好像没说这个Global Net是如何训练的,下面介绍了异常检测头之后就可以介绍Global Net的训练过程了。
异常检测头
IAD-head
IAD-head(Inconsistency anomaly detection)被用来检测局部特征和全局特征的差距,其实就是计算局部特征和全局特征的l2距离。
这篇论文假设对于正常的图片,全局的特征和局部的特征是一致的。异常的图片local的特征和Global的特征就是不一样的。有了之后,就可以对Global-Net进行训练了,目的就是让全局特征和局部特征一致。
DAD-head
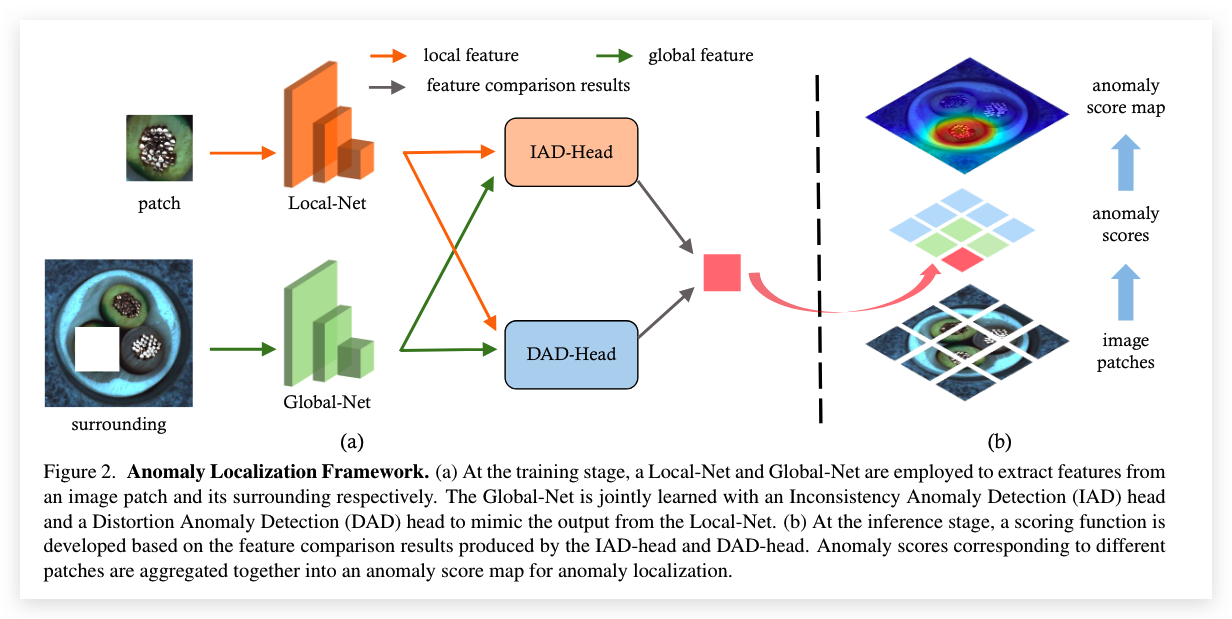
DAD-head是一个可训练的head,是用来检测图像中的扭曲的(弯曲的网格和切割的地毯)。相比聚焦于patch和其周围匹配的IAD-head,DAD-head则是用于定位patch中更加细节的异常。为了能够DAD-head能够有能力去区分正负patch,论文在训练过程中通过随机在patch上添加一些随机的小stain作为负样本。
异常定位
打分函数
在推理过程中将局部的特征和全局的特征送入到IAD-head当中去得到IAD score。
同样也会将局部特征和全局特征送入到DAD-head中得到异常得分:
最后将两个得分加起来就是打分函数的最终公式:
Anomaly Score Map
通过打分函数我们可以得到一个patch区域的异常分数,通过将图像切分为一个个的小patch的方式就可以得到最终整幅图的Anomaly Score Map。结合下图可以更好的理解:
总结
这项工作中提出了一个无监督的异常定位方法,并充分考虑到全局和局部信息的图像。引入了两个异常检测,以充分发现全局和局部特征之间的差异。利用这种多头设计开发的评分函数,我们实现了高精度的异常定位,明显超过了最先进的替代方案。
但是这篇文章获取Anomaly Score Map的方式是通过将图片切分为一个一个的小patch进行的,这样的方式非常的低效。而且性能会受到patch大小的影响。同时本篇文章的Local Net是通过一个Resnet进行知识蒸馏得到的,使用自监督的方式在特定数据集上训练或许会更好。